Setting up Compax3 C3F_T40
76 192-121102 N04 June 2008
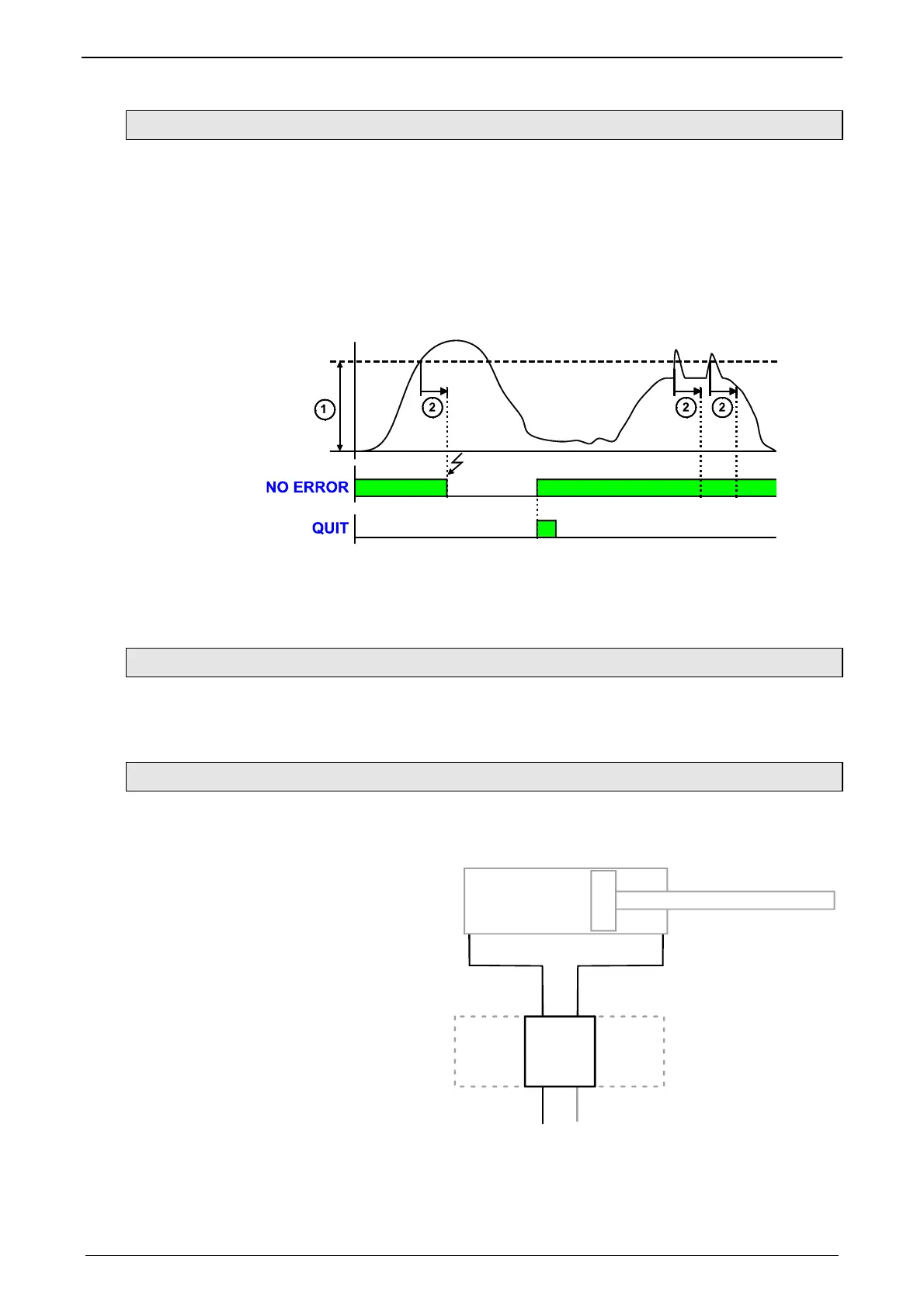
4.1.10.2 Maximum control deviation of force controller
The force control deviation is a dynamic error.
The dynamic difference between the setpoint force and the actual force during a
force control is called the force control deviation. Do not confuse this with the static
difference which is always 0; the target force is always achieved exactly.
If the force control deviation exceeds the given limit (max. control deviation of force
controller), the "time window" elapses.
If the force control deviation after the time window still exceeds the threshold, an
error is reported.
If the force control deviation is below the threshold, the time window is started
anew.
1: max. control deviation of force controller
2: time window force control deviation
NO ERROR: Error output of positioning modules
QUIT: Ackn with MC_Reset module
4.1.10.3 Maximum force
if the "maximum force" is exceeded, an error is reported.
This monitoring is only active, if pressure sensors are present for pA and / or pB.
4.1.10.4 Hydraulic corner power limitation
The hydraulic corner power is calculated from the differential pressure between p0
and pA or pB. If pressure sensors are present for pA as well as for pB, both
differential pressures are evaluated.
AB
P T
Q
D
pP =
.

 Loading...
Loading...









