Communication
C3F_T40
412 192-121102 N04 June 2008
Master / Slave Configuration of the reference system
Configuration Master Slave 1 Slave 2 Slave 3
Travel distance per motor revolution
Numerator
Denominator
Reset distance
Numerator
Denominator
127
10
100
1
233
5
100
1
100
3
100
1
360
7
360
1
Signal source (Master axis)
Virtual Master
Reset distance
Use as current signal source
360
yes
Source HEDA (Slave axis)
"Virtual master" as HEDA Master
Path per motor revolution of the HEDA Master
Numerator
Denominator
yes
not
required
no
233
5
no
100
3
Create cams with the CamDesinger
Distance Counter Reset Position - Numerator
Distance Counter Reset Position -
Denominator
360
1
360
1
100
1
100
1
The C3 ServoManager projects (configuration) can be found on the Compax3
CD: ...\Examples\HEDA\Master.c3p, slave1.c3p, slave2.c3p, slave3.c3p
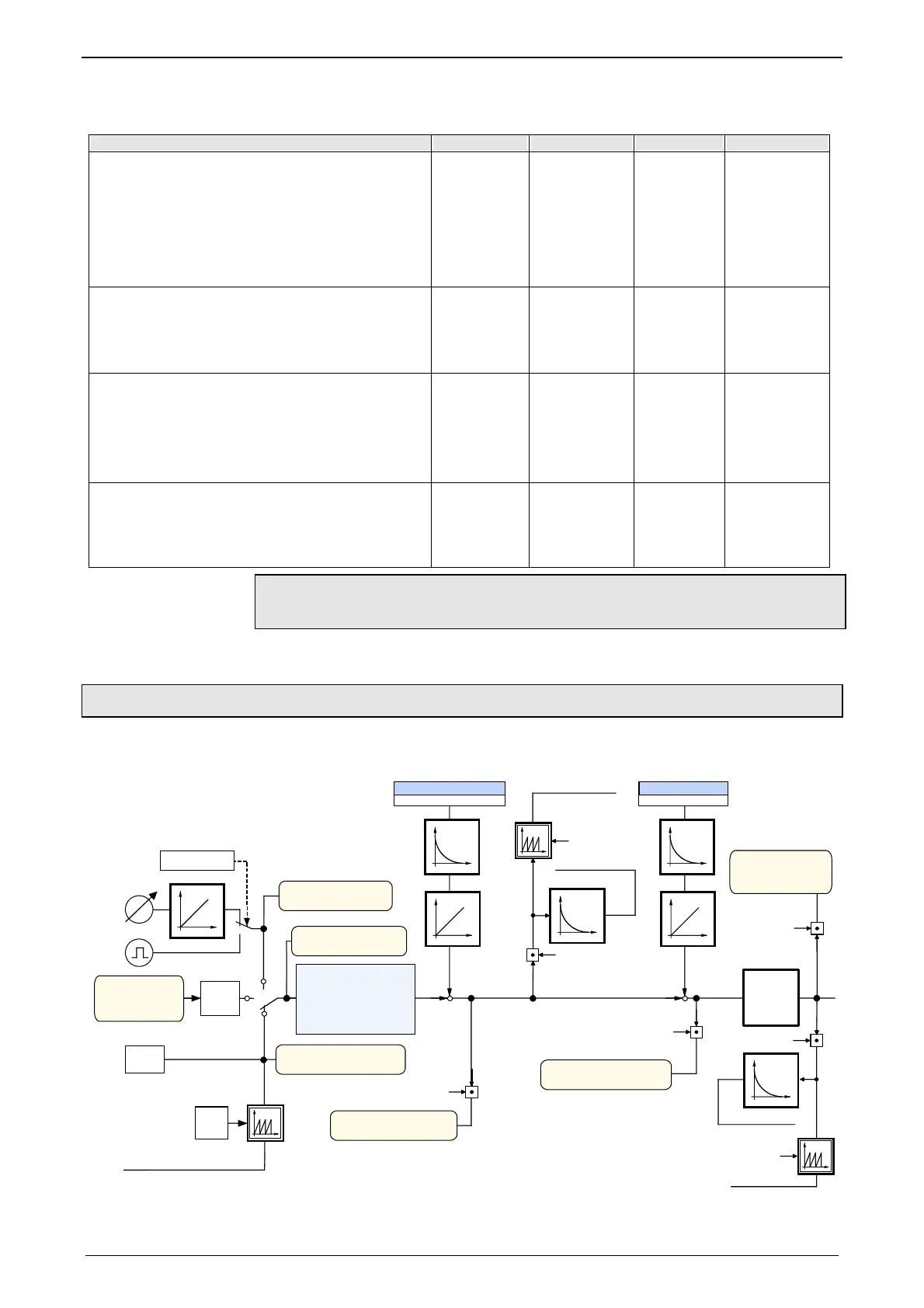
6.8.3. Coupling objects
Coupling objects (framed objects) are suitable as master signal for electronic
coupling and should be in the
DSP Format (see page 395).
Control-
loop
680.5 C3.Status
Position_Actual
SD
RS
681.9 C3.Status
Speed_ActualFilter
680.4 C3.
StatusPosition_
DemandValue
SD
RS
681.4 C3.
StatusSpeed_
DemandValue
HEDA
Virtual
Master
680.2 C3. StatusPosition_
DemandValue2
RV
C3SM Wizard
+/-10V
3920.1 C3Plus.
HEDA_Signal
Processing_Input
Structure
of Cam or
Gearing
MC_MoveSuperImposed
Distance
+
+
+
+
C3_ShiftPosition
Distance
2020.1 C3.External
Signal_Position
3021.2 C3Cam.Signal
Source_Position
2000.2 C3Plus.Profile
Generators_PG2Position
2000.1 C3Plus.Profil
Generators_SG1Position
*
2200.1 C3Plus.Position
Controller_DemandValue
*
2200.2 C3Plus.
Position Controller_
ActualValue
*
Direction
-1 / +1
Direction
-1 / +1
Direction
-1 / +1

 Loading...
Loading...







