Parker EME
Motion control
192-121102 N04 June 2008 179
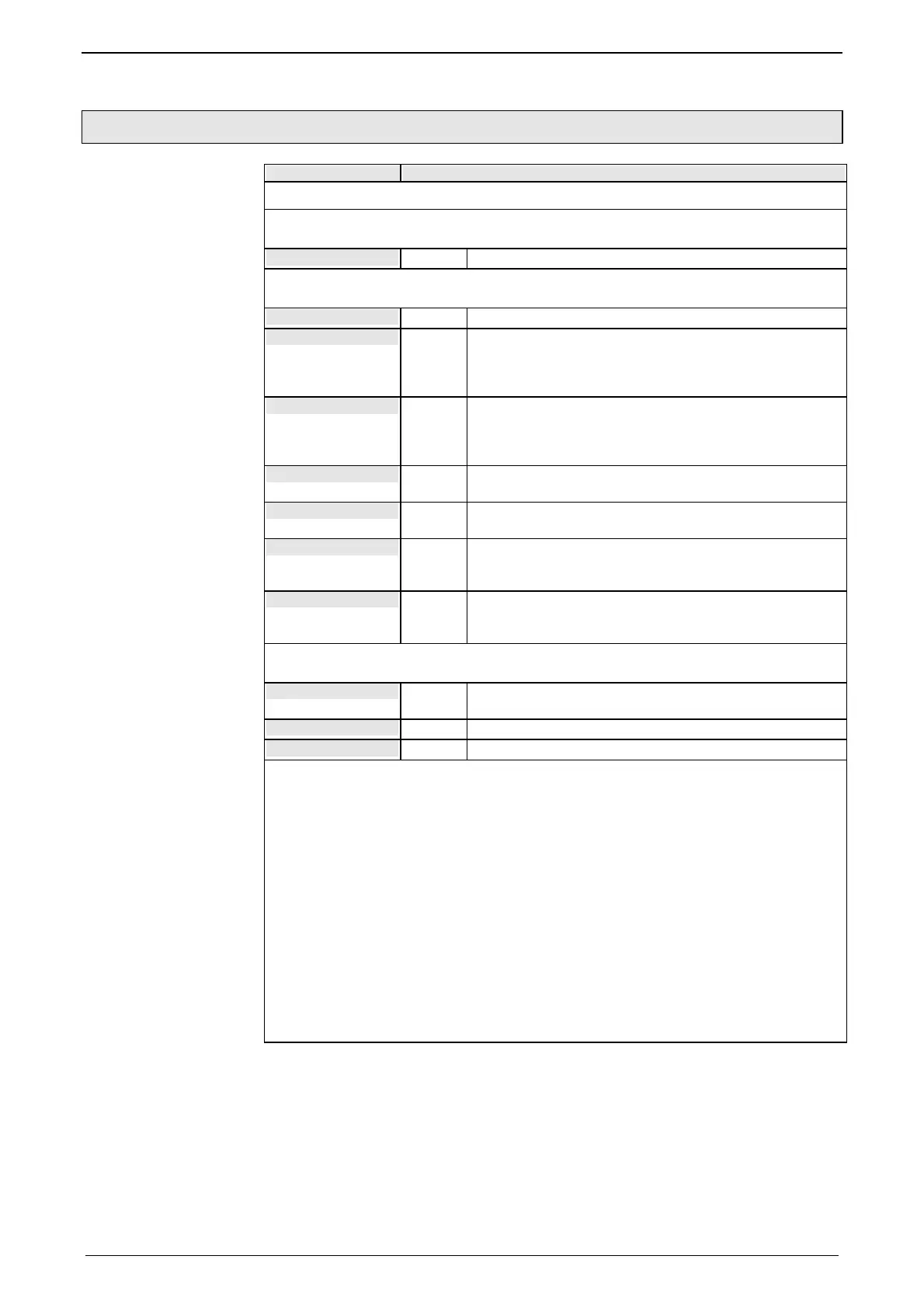
5.6.2. Absolute positioning (MC_MoveAbsolute)
FB name MC_MoveAbsolute
Absolute positioning to a specified position.
VAR_IN_OUT
Axis
INT Axis-ID (library constants)
VAR_INPUT
Execute
BOOL Starts the sequences of the module with positive edge
Position
REAL
Absolute target position of the movement to be executed
(configured unit [Units] ) (positive and negative direction)
<value range> (see page Fehler! Textmarke nicht
definiert.)
Velocity
REAL
Value of the maximum speed (always positive) (not
necessarily reached) <value range> (see page Fehler!
Textmarke nicht definiert.)
[Units/s]
Acceleration
DINT Value of acceleration (always positive) [Units/s²] <value
range> (see page Fehler! Textmarke nicht definiert.)
Deceleration
DINT Value of deceleration (always positive) [Units/s²] <value
range> (see page Fehler! Textmarke nicht definiert.)
Jerk
DINT Value of the acceleration jerk (see page 183) [Units/s³]
(al
ways positive) <value range> (see page Fehler!
Textmarke nicht definiert.)
JerkDecel
DINT
Value of deceleration jerk [Units/s³] (always positive)
<value range> (see page Fehler! Textmarke nicht
definiert.)
VAR_OUTPUT
Done
BOOL
Specified setpoint position on the setpoint generator output
is reached
CommandAborted
BOOL Positioning aborted
Error
BOOL Error while executing module
Note: -
If a SuperImposed movement is started during an absolute movement, the
absolute position is not accessed, but the absolute position plus the position
entered in the SuperImposed.
The same applies if a SuperImposed movement is already being executed and an
absolute movement is started, then the absolute position is not accessed but the
sum of both values.
After the SuperImposed movement has been finished, the absolute position is
accessed with the next absolute movement.
Continuous operation can be selected via object 1111.8
"C3Plus.Position_restposition_mode" <> 0; setpoint value and actual value are
then set to 0 before each positioning.
You can optimize the motion profile data with the "ProfilViewer" (see page 150)
software tool!

 Loading...
Loading...









