Motion control C3F_T40
164 192-121102 N04 June 2008
* C3_PressureForceStop is valid for axes that are entirely pressure/force
controlled, where no position control is configured.
T30 Functions: Transitions and states as continuous line, text not in italics
T40 Functions: complete status diagram, all functions
Special T40 functions are displayed in italics and in dashed line
MC_Power.Enable = FALSE changes to "not powered" from any state (apart
from ErrorStop).
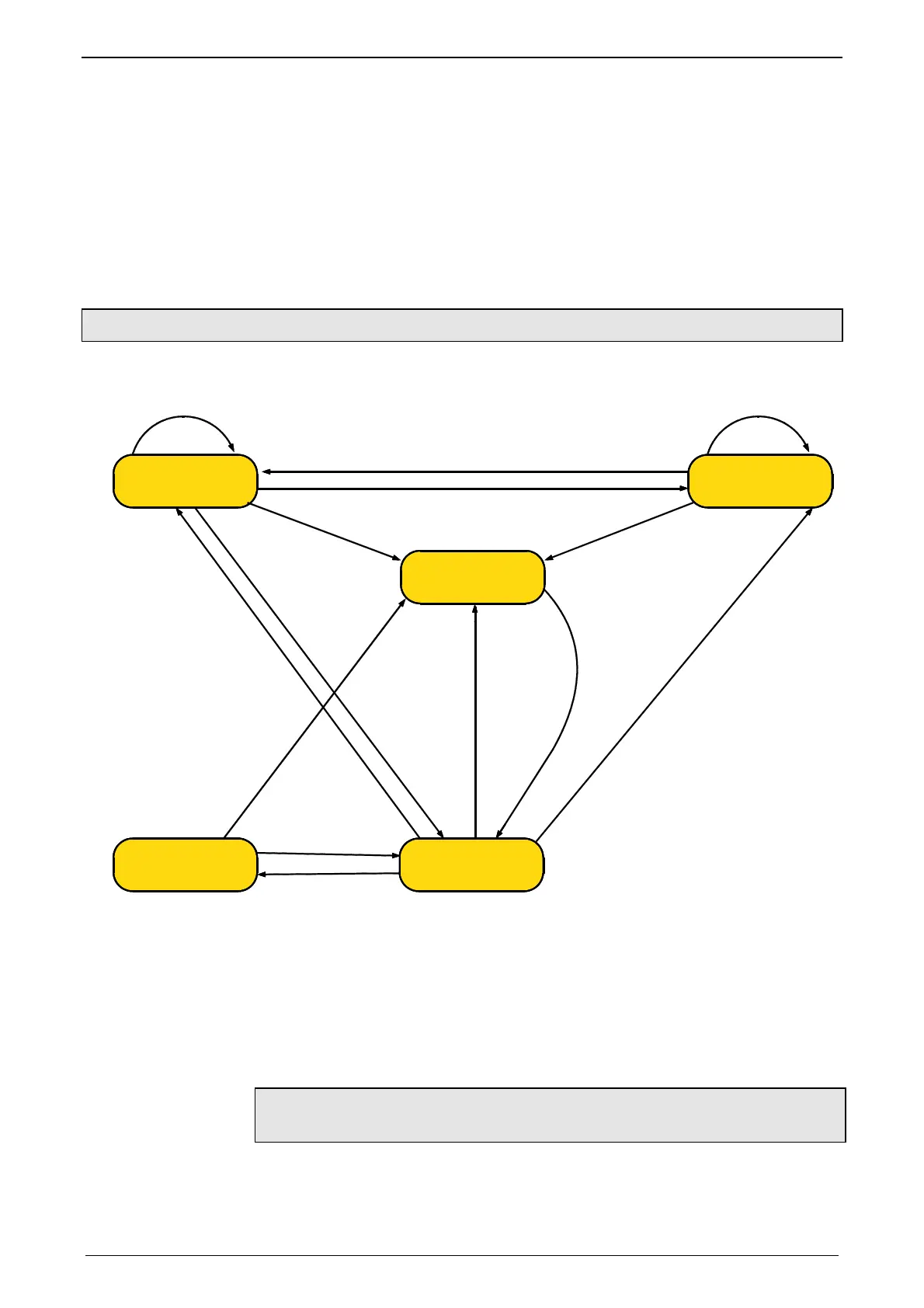
5.2.3. Status diagram of the virtual master
Standstill
Homing
Stopping
Continuous
Motion
Discrete Motion
MC_MoveAbsolute
MC_MoveRelative
MC_MoveAdditive
MC_MoveVelocity
MC_MoveAbsolute; MC_MoveRelative; MC_MoveAdditive
MC_MoveAbsolute
MC_MoveRelative
MC_MoveAdditive
MC_MoveVelocity
MC_Stop
MC_Stop
MC_Move
Velocity
Done
MC_Stop
MC_Stop
Done
MC_Home
MC_Stop.Done
AND NOT
MC_Stop.Execute
Create a program for the virtual axis.
The virtual axis supports the function modules listed in the status diagram.
To do so, the input/output variable ”Axis” is assigned to the constant
”AXIS_REF_Virtual”.
The position value of the virtual axis can be used as master signal source.
Please note that the virtual axis is only available for function modules listed in the
status diagram.
The "virtual master" function is only possible, if no auxiliary axis was
configured.
Note:
Please note:

 Loading...
Loading...









