Parker EME
Setting up Compax3
192-121102 N04 June 2008 85
The most significant bit must be transmitted the first!
Caution! Feedback systems, transmitting data containing error or status bits are
not supported!
Examples of supported SSI feedback systems:
IVO / GA241 SSI;
Thalheim / ATD 6S A 4 Y1;
Hübner Berlin / AMG75;
Stegmann / ATM60 & ATM90;
Inducoder / SingleTurn: EAS57 & Multiturn: EAMS57
4.2.1.2 +/-10V Master speed
Via Analog channel 4 (X11/17 and X1/18) the speed of the master is read in.
From this value a position is internally derived.
The reference to the master is established with the velocity at 10V.
If required the direction of rotation of the master axis read in can be changed.
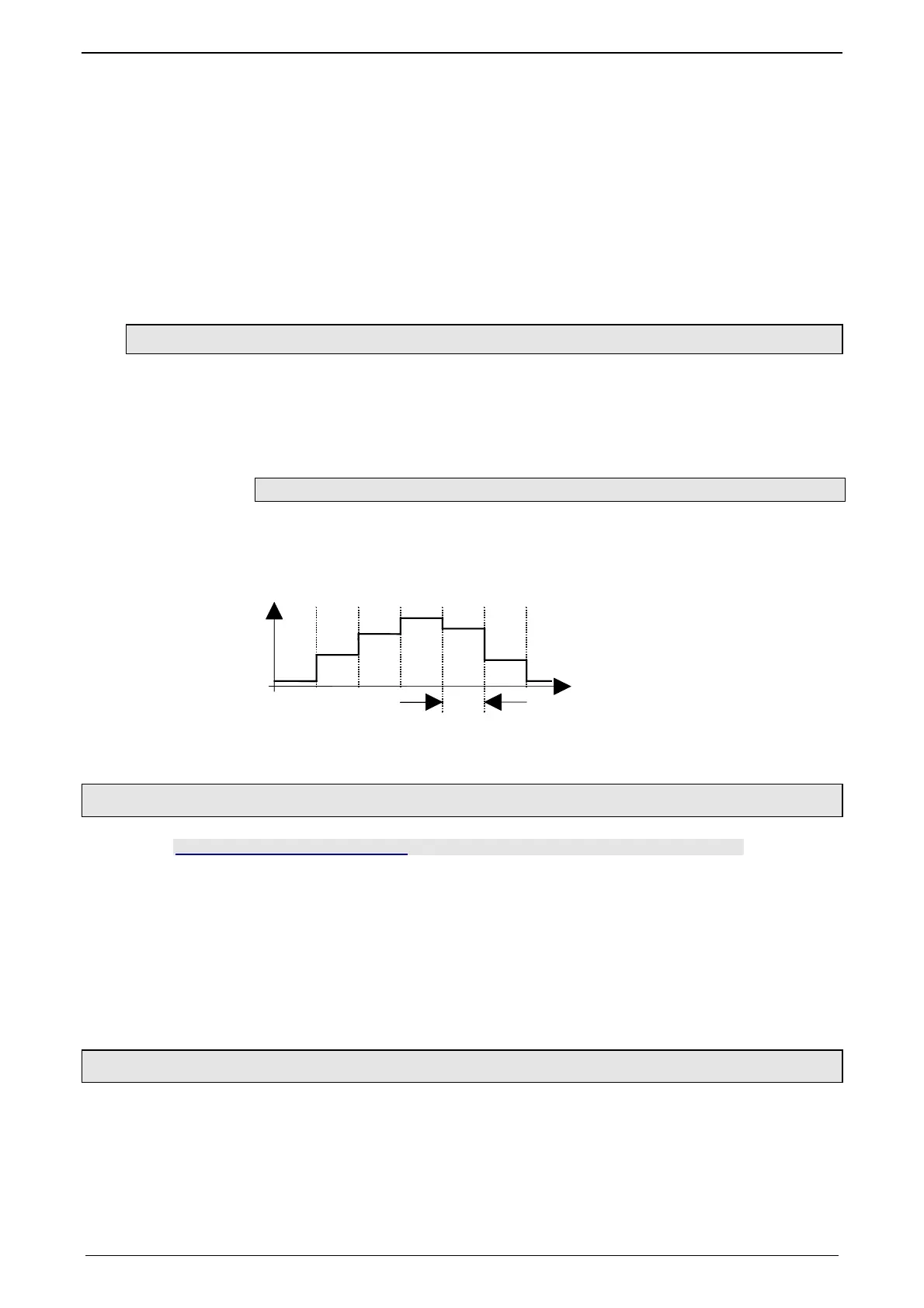
Time grid of master signal source
Averaging and a following filter (interpolation) can help to avoid steps caused by
discrete signals.
If the external signal is analog, there is no need to enter a value here (Value = 0).
For discrete signals e.g. from a PLC, the scanning time (or cylce time) of the signal
source is entered.
T
t
This function is only available if the analog interface +/-10V is used!
4.2.2. Internal virtual master
In this chapter you can read about:
The reset distance of the virtual master is only used for resetting the displayed
value (Object680.2).
The travel per motor revolution of the master axis (numerator/denominator) is set to
1 for a virtual master.
If required the direction of rotation of the master axis read in can be changed.
4.2.3. HEDA Master signal source
Please choose if the virtual master of the HEDA master is transmitted via the
HEDA.
If yes, the input ”travel per revolution” is not necessary, as a positioning signal is
already present.

 Loading...
Loading...









