Parker EME
Motion control
192-121102 N04 June 2008 209
Compax3 is able to simulate mechanical cams as well as cam switching
mechanisms electronically.
This helps to realize discontinuous material supply, flying knife and similar drive
applications with distributed drive performance.
The compact servo controller processes the position signals of a master axis and
controls a servo motor, torque motor or a direct-drive linear actuator via the desired
motion profile, which is defined in the form of an interpolation point memory. The
combination of drive, control and power unit in one device offers many advantages:
Fast and easy commissioning.
fast and stable control.
feedforward control measures result in reduced need for peak torque and
improved response behavior - therefore following errors are avoided.
central digital control from the setpoint generator to the power output stage.
lower wiring overhead and thus substantially reduced fault liability.
5.10.1.1 Function principle
In this chapter you can read about:
Coupling and decoupling ................................................................................................. 209
Mark synchronization....................................................................................................... 210
Slave
Master
Slave
Master
90° 180° 270° 360°
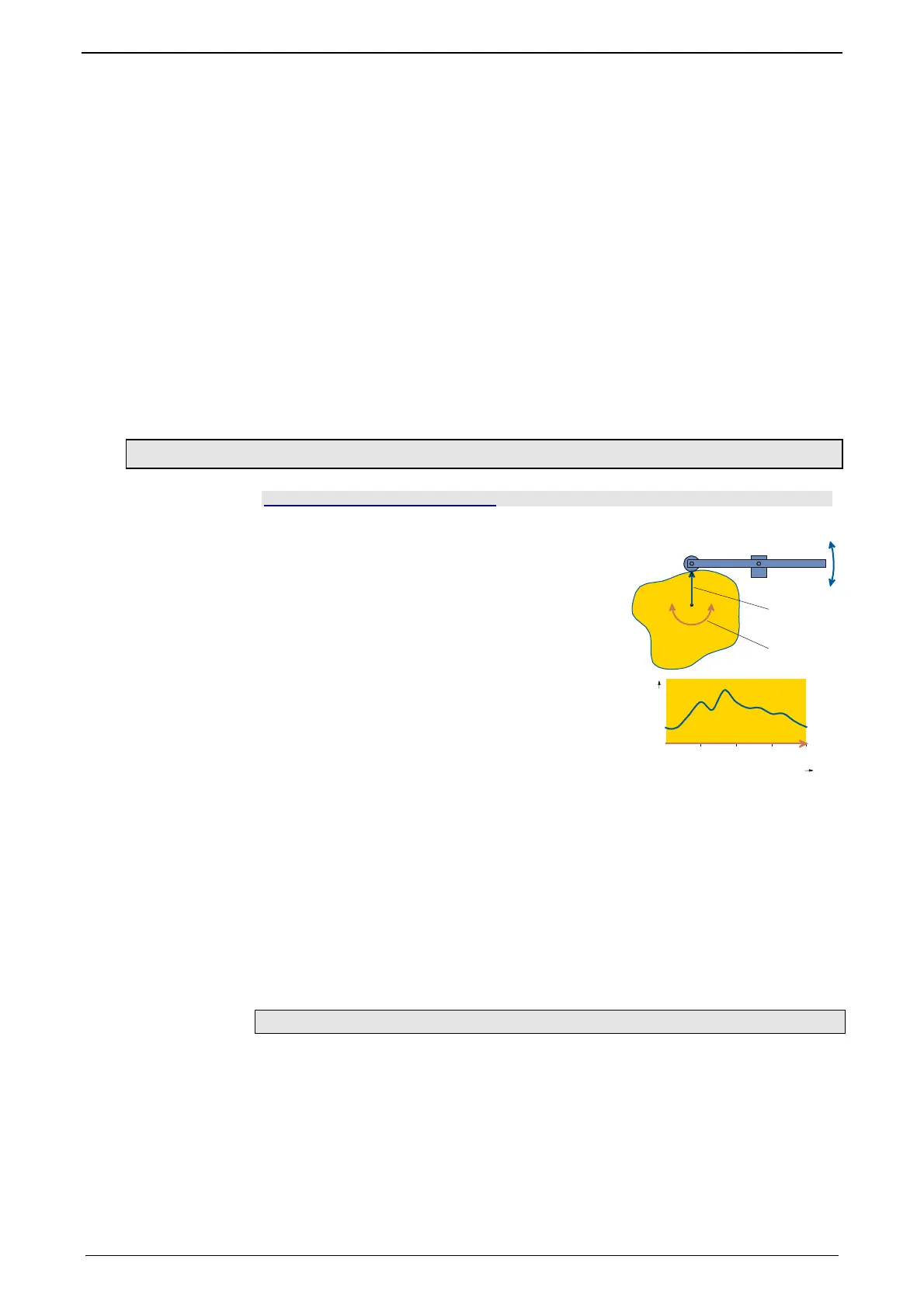
Depending on the angle setting of a leading axis (master), the following axis (slave)
is moved according to a user-defined motion profile. The master position moves
within a defined value range; the master clock distance, and moves through it
cyclically. Each cycle corresponds to a revolution of the cam or a repetition cycle of
any complex movement. Via the master position, a sequence of interpolation points
with up to 10000 non-equidistant interpolation points is addressed. Compax3
interpolates linarly between the interpolation points. Those position setpoint values
are used to form the feedforward signals for the subordinate controller cascades of
the following axis. This feedforward of speed and acceleration is used to reduce
the following error of the following axis as fas as possible.
Coupling and decoupling
An important function for complex plants is the coupling and decoupling of
individual drives, triggered by an external control signal. During the coupling, the
following axis (slave) is synchronized via a defined motion profile to the position of
the leading axis (master). This can take place from any start position with a
continuous, jump free speed course. Upon decoupling, the slave leaves the
synchronous operation and is brought definedly to a standstill. The coupling or
decoupling can take place with a running or stationary master axis.

 Loading...
Loading...









