Motion control C3F_T40
186 192-121102 N04 June 2008
5.6.4. Additive positioning (MC_MoveAdditive)
FB name MC_MoveAdditive
Adds a relative distance to the target position of a positioning process in progress.
VAR_IN_OUT
Axis
INT Axis-ID (library constants)
VAR_INPUT
Execute
BOOL Starts the sequences of the module with positive edge
Distance
REAL Relative distance <Value range> (see page Fehler!
Textmarke nicht definiert.)
MoveVelocity
REAL
Value of maximum speed (always positive) (not necessarily
reached) [Units/s] <value range> (see page Fehler!
Textmarke nicht definiert.)
Acceleration
DINT Value of acceleration (always positive) [Units/s²] <value
range> (see page Fehler! Textmarke nicht definiert.)
Deceleration
DINT Value of deceleration (always positive) [Units/s²] <value
range> (see page Fehler! Textmarke nicht definiert.)
Jerk
DINT Value of the acceleration jerk (see page 183) [Units/s³]
(al
ways positive) <value range> (see page Fehler!
Textmarke nicht definiert.)
JerkDecel
DINT
Value of deceleration jerk [Units/s³] (always positive)
<value range> (see page Fehler! Textmarke nicht
definiert.)
VAR_OUTPUT
Done
BOOL Specified distance has been reached
CommandAborted
BOOL Positioning aborted
Error
BOOL Error during positioning
Note:
In the case of dynamic positioning (module is called during a positioning process)
the specified position is added to the current target position.
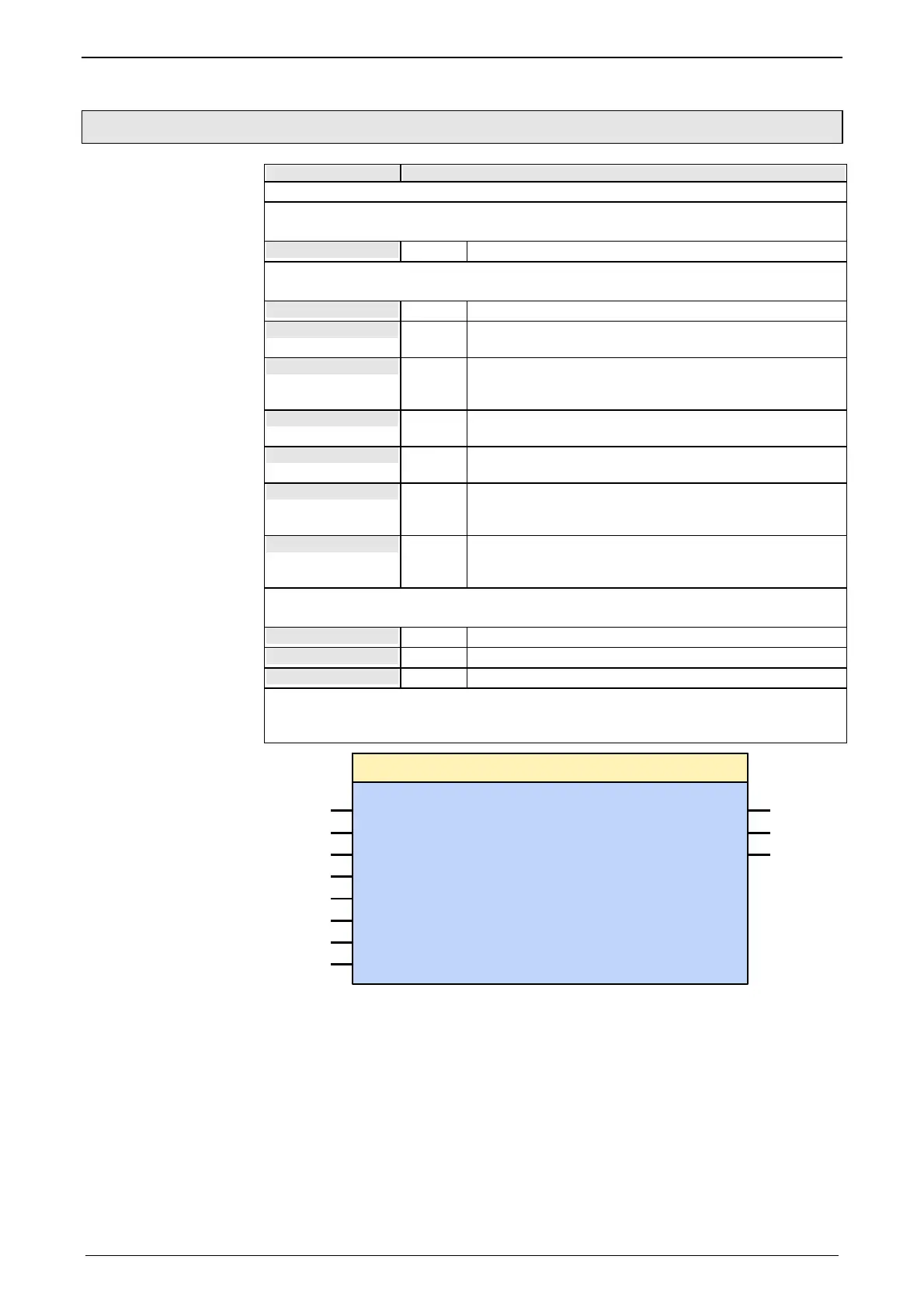
Execute : BOOL
Distance : REAL
Done : BOOL
Error : BOOL
MC_MoveAdditive
CommandAborted : BOOL
Velocity : REAL
Acceleration : DINT
Deceleration : DINT
Jerk : DINT
JerkDecel : DINT
Axis : (VAR_IN_OUT)

 Loading...
Loading...







