Parker EME
Motion control
192-121102 N04 June 2008 257
5.10.7.2 Exiting the active curve with coupling movement (C3_CamOut)
In this chapter you can read about:
Direct decoupling (CouplingMode = 0) ............................................................................ 258
Quadratic decoupling (CouplingMode = 1) ...................................................................... 259
Decoupling with change-over function (CouplingMode = 2) ............................................ 260
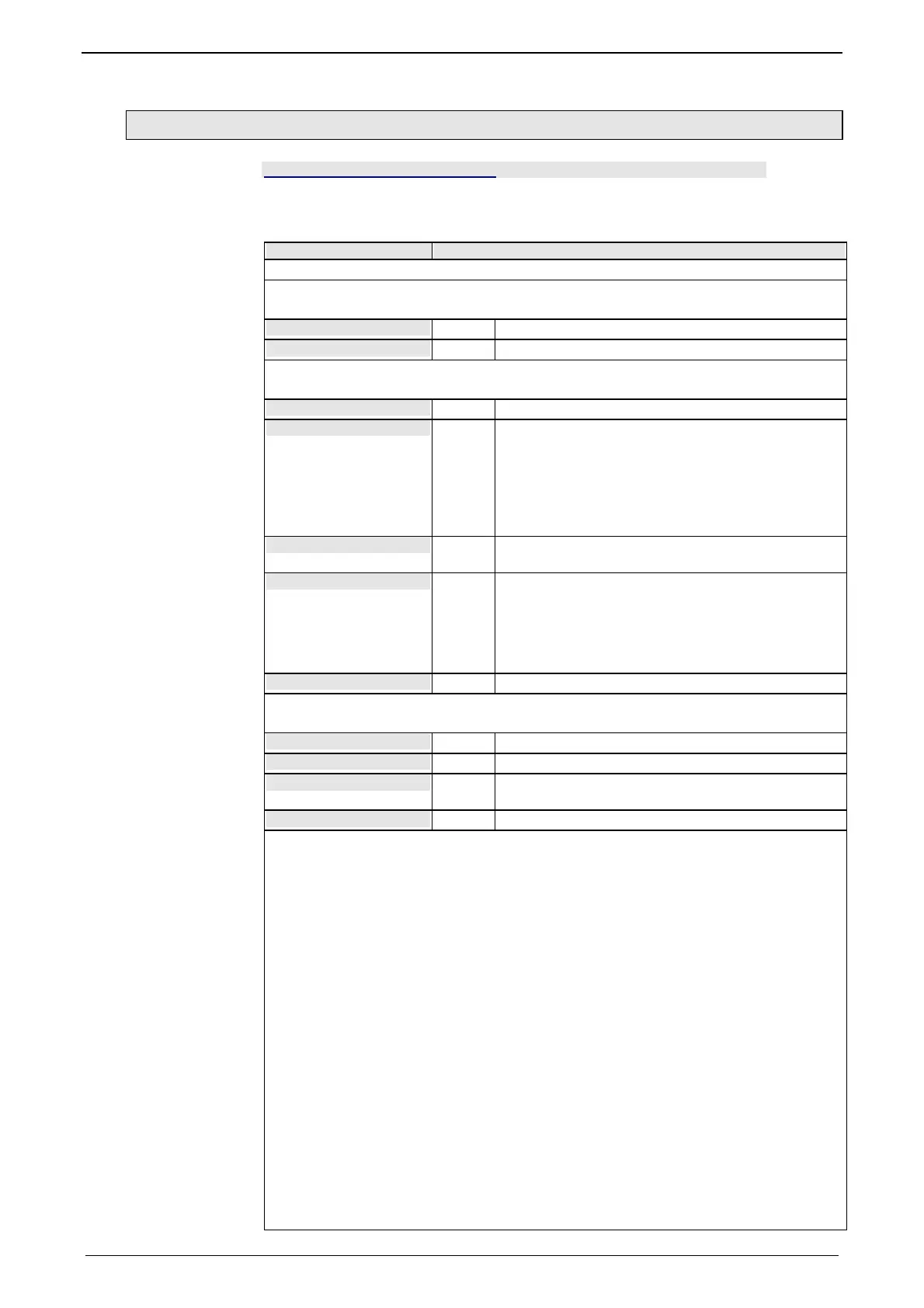
FB name C3_CamOut
Decouple the active curve with adjustable coupling movement
VAR_IN_OUT
Master
INT Axis ID; constant: AXIS_REF_LocalCam
Slave
INT
VAR_INPUT
Execute
BOOL Activate the decoupling process with a positive edge
DecouplingMode
INT
0 = decoupling without coupling movement, after the
master having traveled over the decoupling position
MA in positive direction.
(MB and S0 not relevant)
1 = decoupling via quadratic function;
the master braking position (MB) is calculated
2 = decoupling via changeover function
DecouplingPosition
REAL
Master decoupling position in Master units (MA)
Value range: 0 ... MT
BrakingPosition
REAL
Master braking position in master units (MB)
(is taken into consideration with CouplingMode = 2
with CouplingMode = 1, the braking position is
calculated).
MB must be > than MA.
Value range: 0 ... n*MT
StandstillPosition
REAL Slave standstill position in Slave units (S0)
VAR_OUTPUT
Done
BOOL Decoupling complete
InSync
BOOL Wait for decoupling position
Error
BOOL
Command aborted
Error in the cam operation
EndOfProfile
BOOL End of the curve cycle.
Note:
Decoupling is not possible during coupling.
Master decoupling position (MA) and Master braking position (MB)
With DecouplingMode 0: MA is taken into consideration, MB not relevant.
With DecouplingMode 1: MA is taken into consideration; MB is calculated.
With DecouplingMode 2: MA is taken into consideration; MB is taken into
consideration.
The Slave standstill position is not taken into consideration with DecouplingMode
= 0.
With DecouplingMode =1 the curve must be constantly rising at the Master
decoupling position (MA).
if the master runs backwards after the beginning of the decoupling movement, the
curve is accessed again after reaching the decoupling position.
With changeover, the decoupling function depends on the current curve.
The relevant master position for ecoupling position and braking position is object
3030.24.
In the event of error message 0xFFE2: Error in the IEC61131-3 program
sequence. Function module was called with incorrect parameters.
DecouplingMode=2 and BrakingPosition <= DecouplingPosition

 Loading...
Loading...









