Motion control C3F_T40
258 192-121102 N04 June 2008
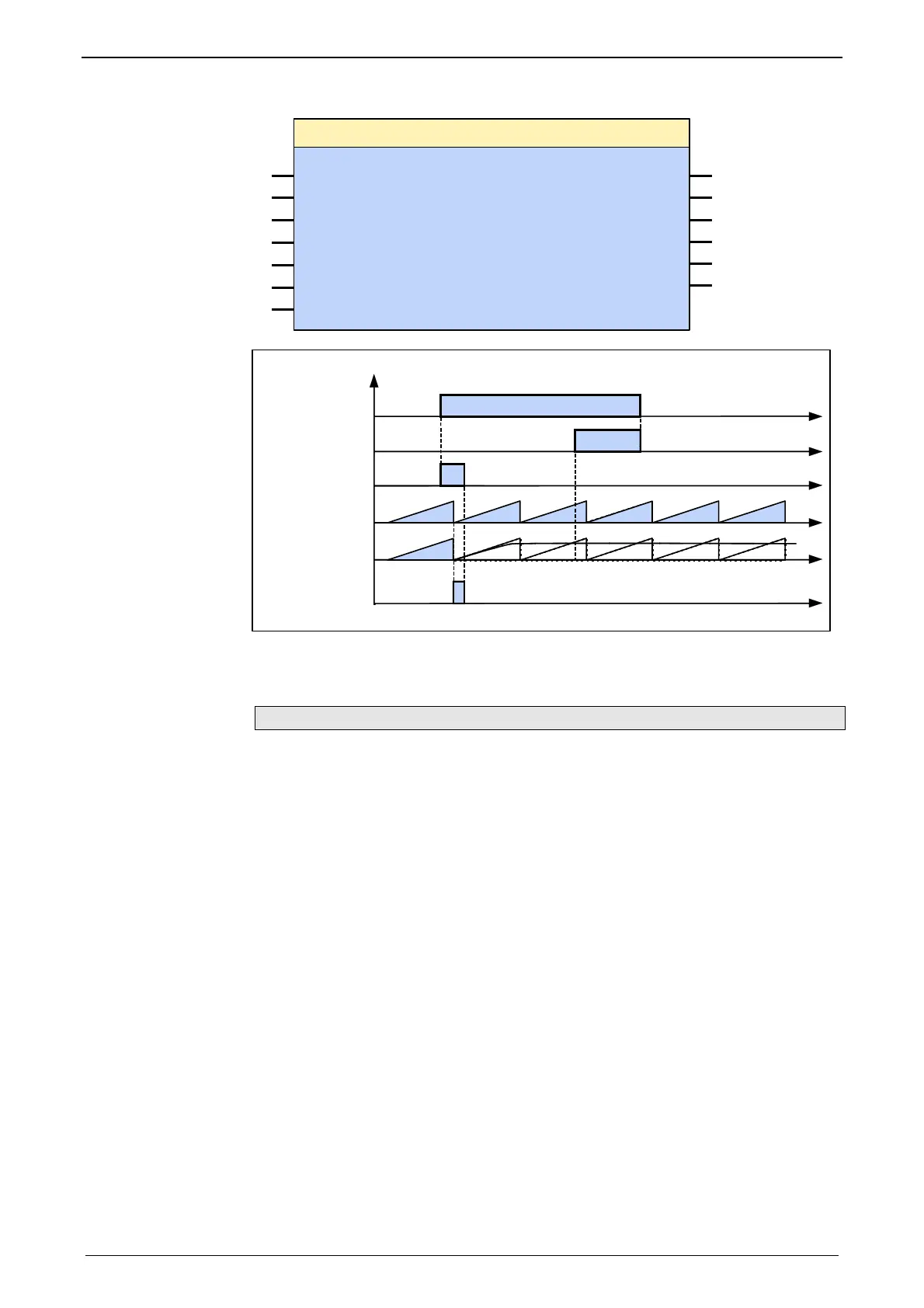
C3_CamOut
Master : AXIS_REF
Slave : AXIS_REF
Master : AXIS_REF
Slave : AXIS_REF
Done : BOOL
Execute : BOOL
Error : BOOL
EndOfProfile : BOOL
DecouplingMode : INT
DecouplingPosition : REAL
BrakingPosition : REAL
StandstillPosition : REAL
InSync : BOOL
Execute
Masterzyklus
t
t
1
0
1
0
1
0
Done
Slavezyklus
1
t
1
0
EndOfProfile
t
1
0
MA
MB
InSync
t
1
0
S0
t
Example with DecouplingMode = 1 and C3_CamTableSelect: Periodic = TRUE.
Direct decoupling (CouplingMode = 0)
With direct decoupling, the curve operation is immediately terminated with the
Execute.
In order to avoid speed jumps, the master should be at a standstill during direct
decoupling or should be decoupled at a point, where the slope iss 0 (constant slave
position).

 Loading...
Loading...







