Parker EME
Motion control
192-121102 N04 June 2008 309
5.13.5. Integration of Parker I/Os (PIOs)
In this chapter you can read about:
Initializing the PIOs (PIO_Init) ..........................................................................................309
Reading the PIO inputs 0-15 (PIO_Inputx...y)..................................................................310
Writing the PIO outputs 0-15 (PIO_Outputx...y) ...............................................................311
Example: Compax3 as CANopen Master with PIOs ........................................................312
In order to integrate PIOs via CANopen, the CANopen operating mode "Master for
PIOs
(see page 368, see page 367)" must be configured.
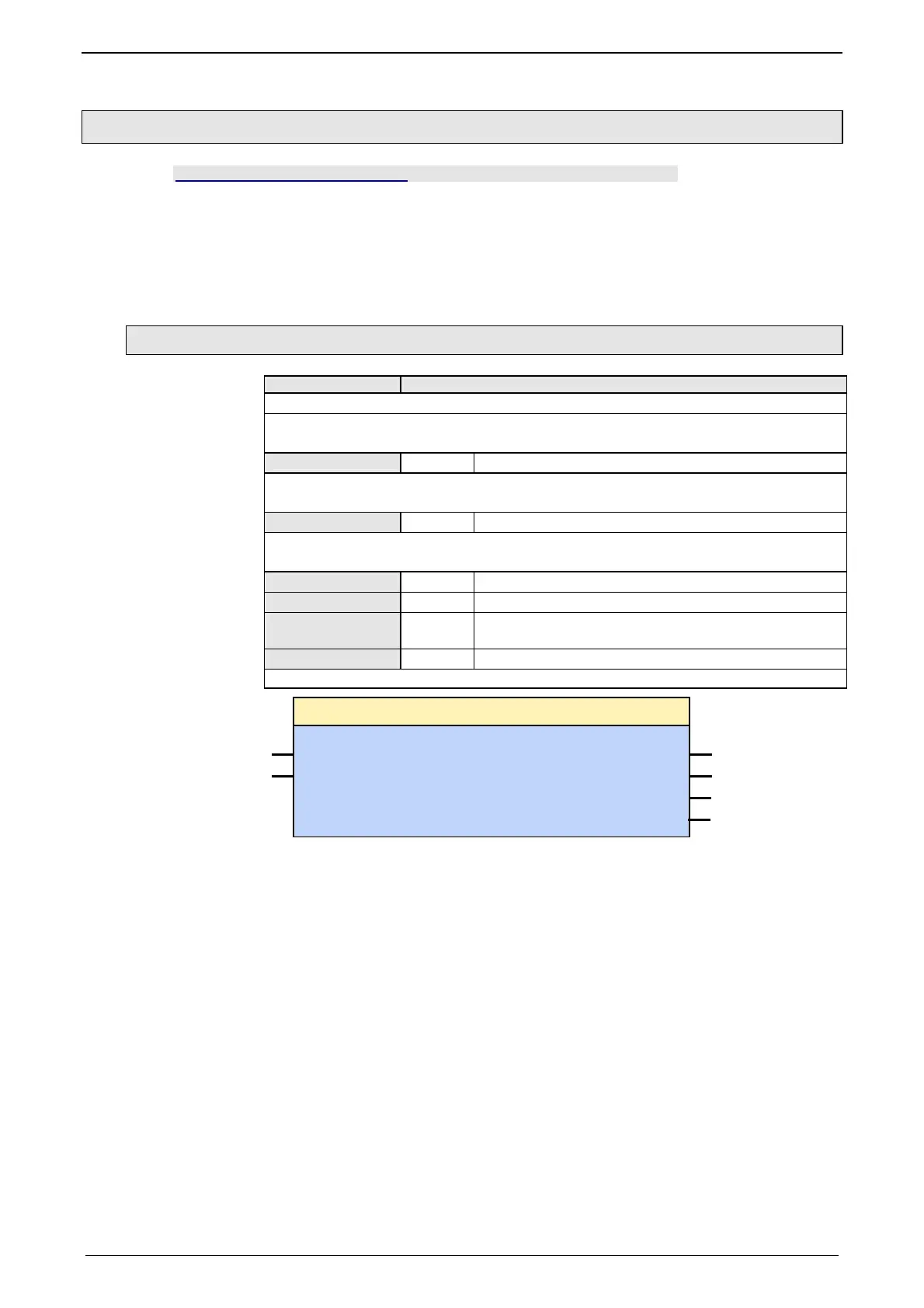
5.13.5.1 Initializing the PIOs (PIO_Init)
FB name PIO_Init
Initialization of the PIOs
VAR_IN_OUT
Device
INT PIO - ID (Address)
VAR_INPUT
Execute
BOOL Activates the module if there is a positive edge
VAR_OUTPUT
Done
BOOL Initialization executed
Error
BOOL An error occurred during initialization
ErrorCode
WORD
1 = no Parker device
Additional errors can be found in the error list.
AbortCode
DWORD
SDO abort code (see page 383)
Note: Please execute this module at the beginning of the IEC program.
Execute : BOOL
Device : INT
Done : BOOL
PIO_Init
Error : BOOL
ErrorCode : WORD
AbortCode : DWORD

 Loading...
Loading...







