Parker EME
Motion control
192-121102 N04 June 2008 329
5.16 Profibus: Emulating the ProfiDrive profile
(C3F_ProfiDrive_Statemachine)
The function module can be found in the "C3_Profiles_lib" library and must be
integrated via the library manager before use.
Notes on the use:
The input values coming from the master control via the Profibus can be changed
before they are transmitted to the Statemachine (e.g. I/Os).
In the simplest case, the control word and the motion parameters (which may
come from the Profibus) are manipulated by te IEC program.
If the Statemachine is active, all motions must be executed via the Statemachine.
Motions such as for example MoveAbsolut, MoveRelativ; MoveAdditiv;
MoveVelocity; Gearing, Reg-related positioning are possible. Or with Compax3F:
Force/pressure regulating.
With the "control via PLC" bit (CW1 bit 10 = 1), the Statemachine takes the
control for the drive (is active). This means that no functions concerning the
device status (such as Power, MoveX) by other function/program modules are
permitted. If "no control" is selected (CW1 bit 10 = 0), the device status can be
changed via function/program modules.
The Profidrive Statemachine works independently of hte Profibus. I.e. it can also
be used in connection with other busses.
The Profidrive Statemachine contains states, which cannot be mapped to the
PLCopen status machine.
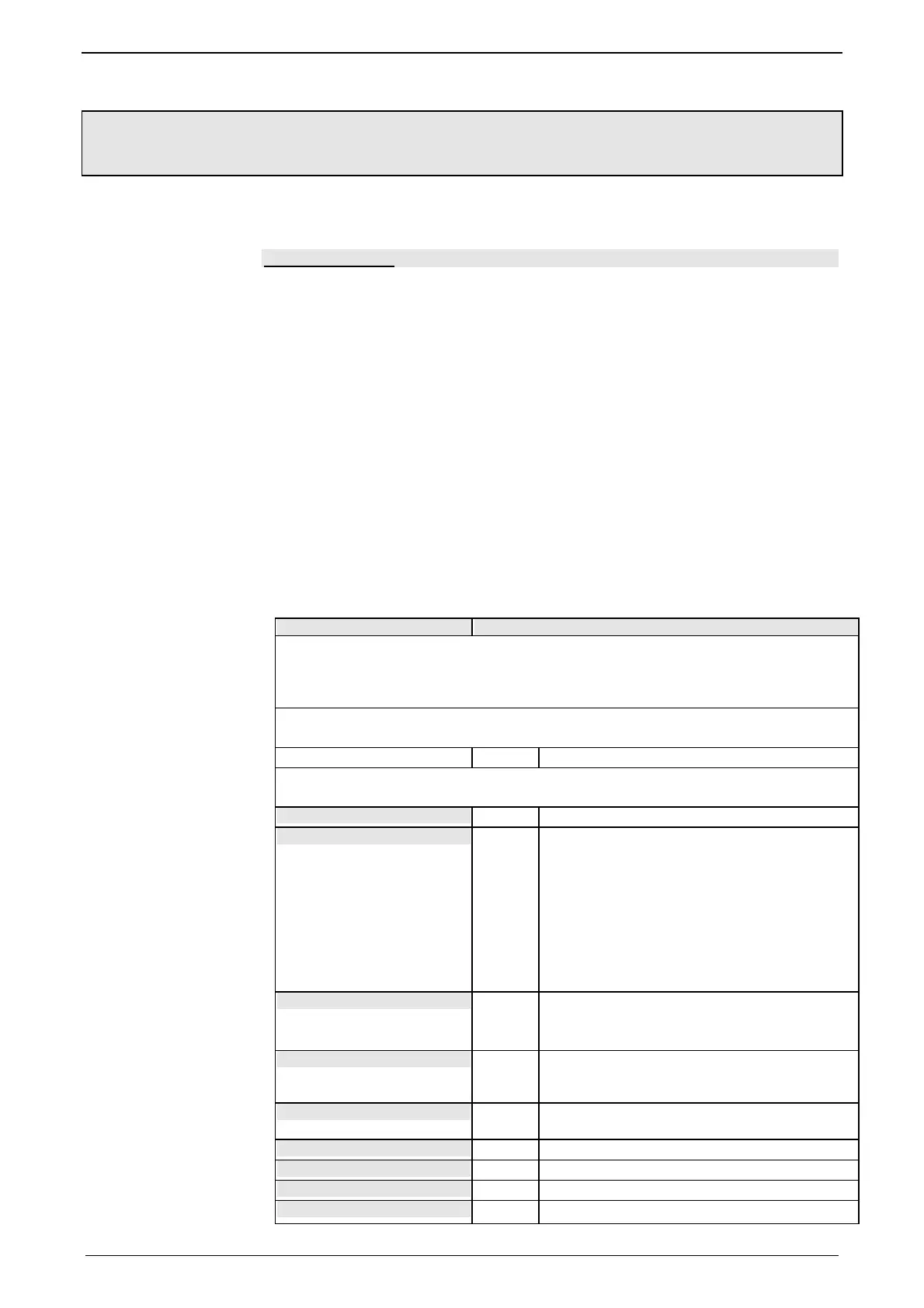
FB name C3_ProfiDrive_Statemachine
With the aid of the Profibus function module, the PROFIdrive profile can be
simulated. The profile is described in the help of the Compax3 I20T11 technology
function (set operation is however not possible).
The inputs of the module can be assigned as required.
VAR_IN_OUT
-- -- --
VAR_INPUT
CW1
WORD Control word according to Profidrive (see below)
STWadd
INT
additional control word: the following functions
can be triggered in the positioning mode
0: no action
1: NOP (No Operation)
2: Stop
3: Homing
Execution takes place with the "activate motion
order" of CW1. The value must be reset to zero
after the execution!
OperationMode
INT Operating mode after Profidrive
1: Speed control
2: Positioning
Position
REAL
Position setpoint value for all positioning
commands (MoveAbs, MoveRel, MoveAdd,
RegSearch, RegMove preparation)
Velocity
REAL
Setpoint speed in operating mode 1 (speed
control) and for MoveVelocity (not for positioning)
VelocityForPosition
REAL Setpoint travel speed for positioning
VelocityForJog
REAL Speed for JOG
Acceleration
DINT Commanded acceleration
Deceleration
DINT Setpoint deceleration

 Loading...
Loading...







