Motion control C3F_T40
166 192-121102 N04 June 2008
5.3.2. Stop (MC_Stop)
In this chapter you can read about:
MC_Stop at pressure/force control...................................................................................167
MC_Stop: Example 1........................................................................................................167
MC_Stop: Example 2........................................................................................................168
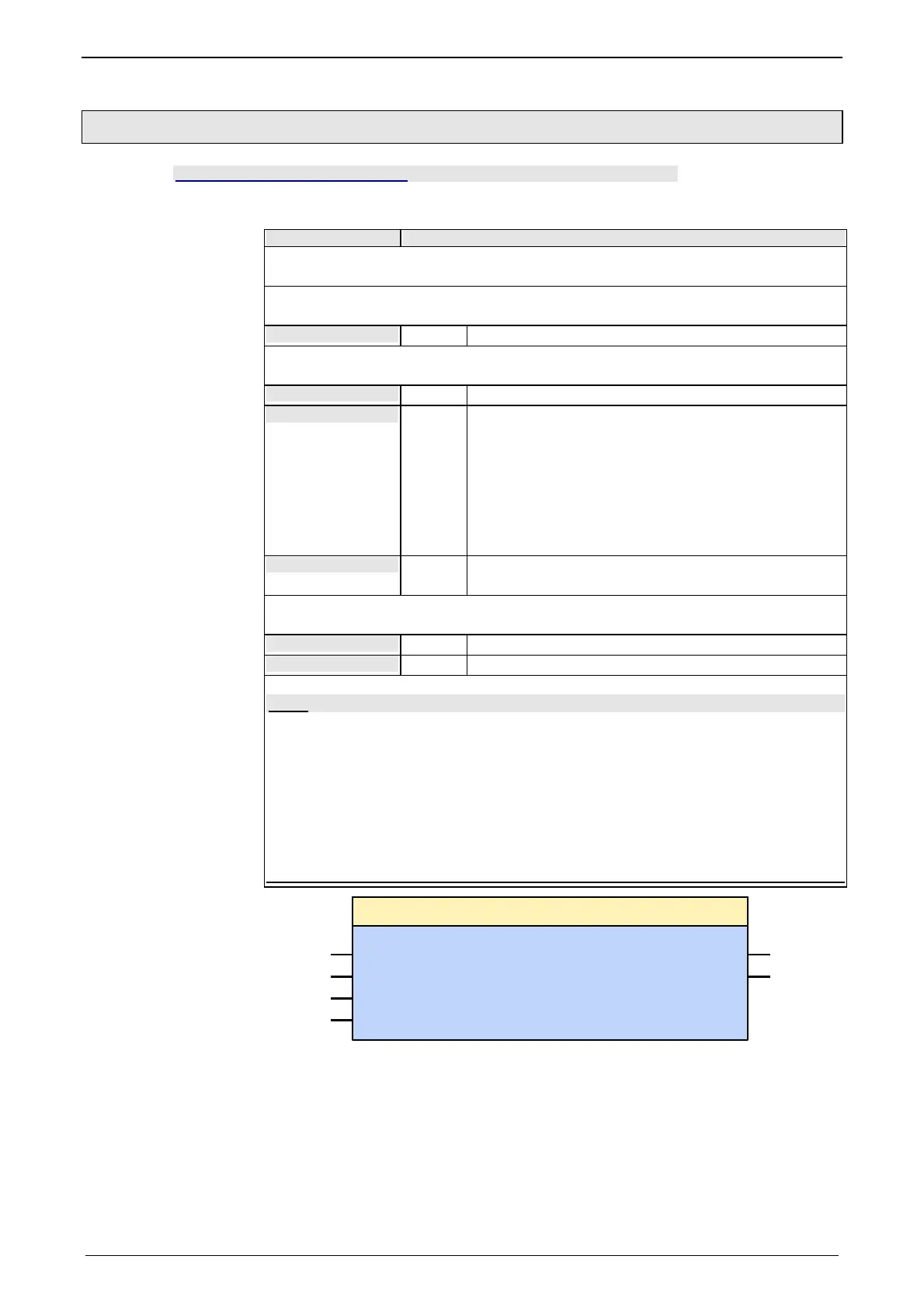
FB name MC_Stop
Stops the current movement
Please note: Only one instance of MC_Stop is permitted per axis!
VAR_IN_OUT
Axis
INT Axis-ID (library constants)
VAR_INPUT
Execute
BOOL Stops the movement
Deceleration
DINT The value of deceleration (always positive) [units/s²]
Value range: 0.24 rev/s² ... 1000000 rev/s²
Please observe:
The configured STOP ramp is limited. The STOP
ramp will not be smaller than the deceleration set in
the last motion set.
Jerk
DINT Value of the deceleration jerk [units/s³] (always positive)
Value range: 30 rev/s³ ... 125,000,000 rev/s³
VAR_OUTPUT
Done
BOOL Stop move
Error
BOOL Error while stopping positioning
Note:
As long as the "Execute" input is set, the axis remains in the "Stopping" status (as
long the axis is activated) and is unable to execute any additional movement
commands!
If the axis is deactivated by setting the Enable signal of the "MC_Power" module to
FALSE, the Stopping state will then be exited.
If the enable signal of the "MC_Power" module is set to TRUE again, the axis goes back to
the "Stopping" state again if the Execute input of the "MC_Stop" module is still TRUE.
C3 powerPLmC Note: This module is also available as group function block. You can then
trigger this function for the entire Compax3 group.
Execute : BOOL Done : BOOL
Error : BOOL
MC_Stop
Deceleration : DINT
Jerk : DINT
Axis : (VAR_IN_OUT)

 Loading...
Loading...









