Parker EME
Motion control
192-121102 N04 June 2008 167
5.3.2.1 MC_Stop at pressure/force control
If a position control is configured, the MC_Stop.Execute = TRUE switches to
position control (pQ). The axis is stopped (with a ramp defined via Deceleration
and Jerk).
If no position control is defined, MC_Stop does not have any function. Set the axis
into a Stop state by specifying a defined force (or pressure difference) in a Stop
state.
5.3.2.2 MC_Stop: Example 1
The following illustration shows an example of how the MC_Stop module interrupts
and stops a movement that is in progress.
If a positioning module is interrupted by the MC_Stop module, it reports "Command
Aborted" and can no longer be executed as long as the MC_Stop module is active.
If the MC_Stop module is inactive (no "Execute" signal), the function module can
be executed again.
Execute
Stopping
Velocity
Done
Standstill
MC_Stop.
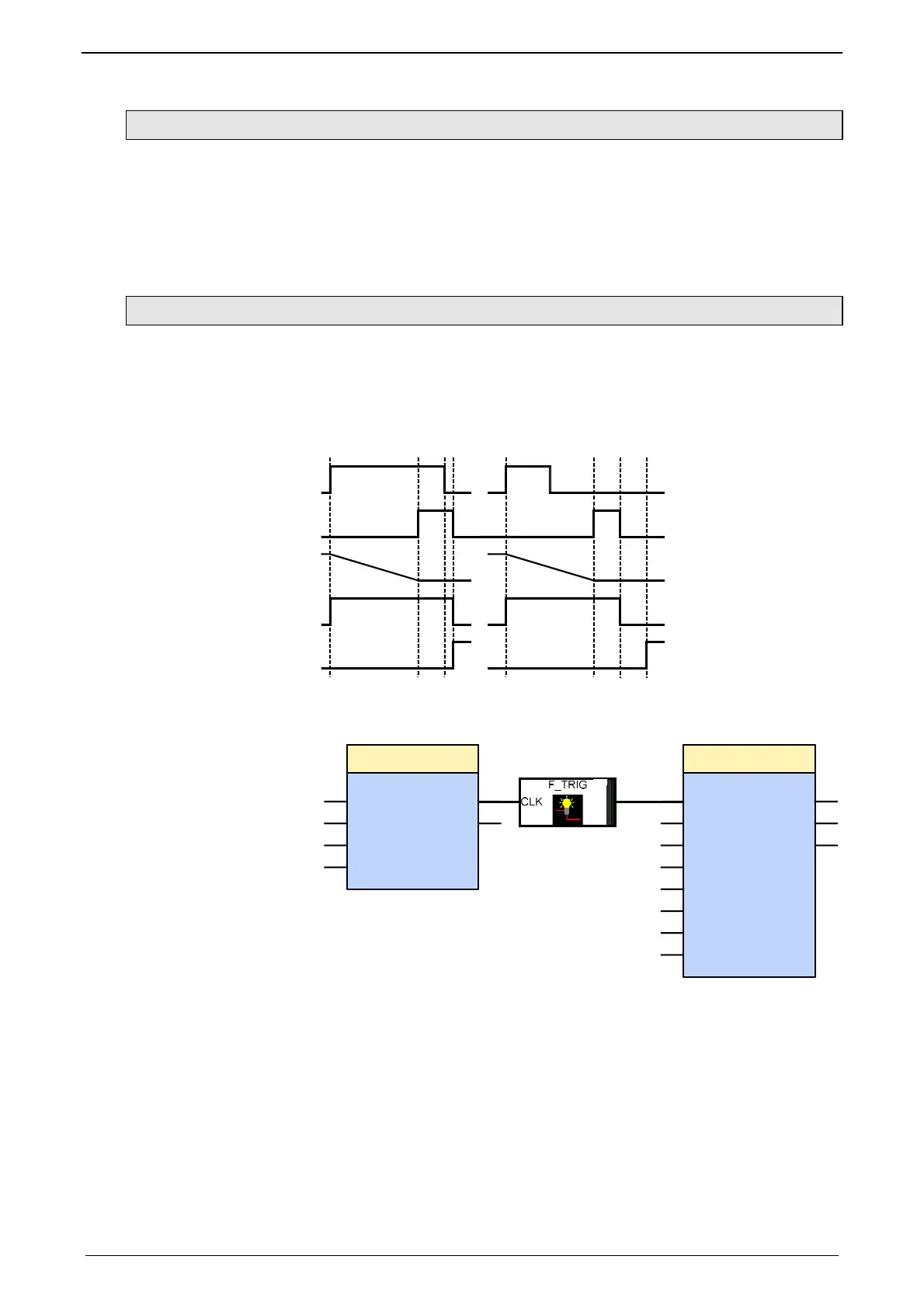
If a positioning is to follow immediately after the stop, this can take place with the
falling edge of the done output at the earliest:
Execute Done
Error
MC_Stop
Deceleration
Jerk
AxisAXIS_REF_
LocalAxis
stopAxis
400
4000
Execute
Distance
Done
Error
MC_MoveRelative
Command
Aborted
Velocity
Acceleration
Deceleration
Jerk
JerkDecel
AxisAXIS_REF_LocalAxis
6000. 0
500. 0
100
100
1000
1000
Timing Diagram:
Note:

 Loading...
Loading...







