Parker EME
Motion control
192-121102 N04 June 2008 195
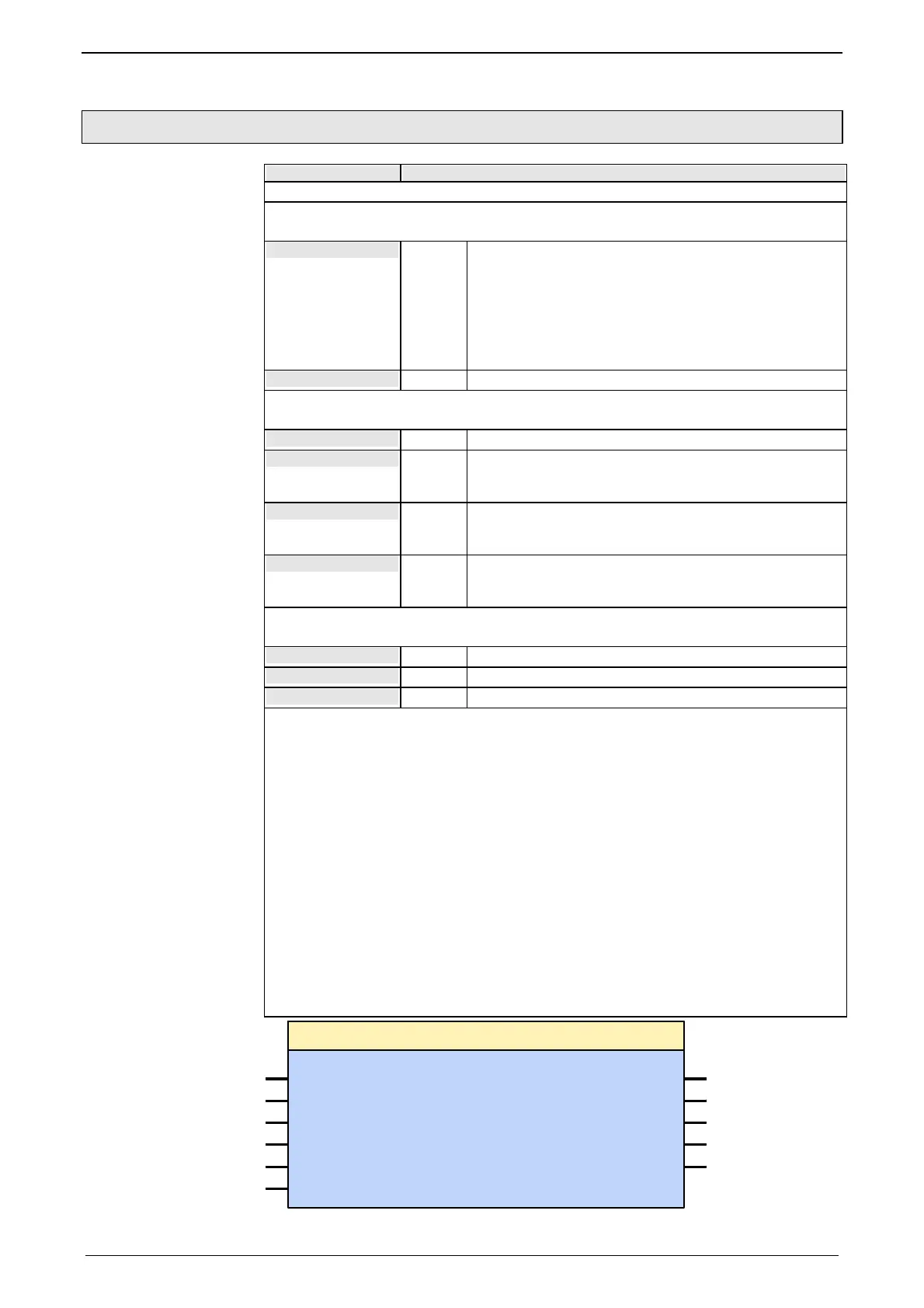
5.6.8. Electronic gearbox (MC_GearIn)
FB name MC_GearIn
Controlled speed and position synchronicity with adjustable transmission ratio
VAR_IN_OUT
Master
INT
Constant for the master signal source (see page 161)
Config
uration (see page 82) of the signal sources
Please note:
The auxiliary axis can only be coupled to the position
setpoint value of the main axis => if Slave = auxiliary
axis, the main axis must be the Master.
The reduction ratio is then fixed to 1:1.
Slave
INT
VAR_INPUT
Execute
BOOL Starts the sequences of the module with positive edge
RatioNumerator
REAL
Reduction ratio numerator
Field is only valid, if Slave=AXIS_REF_LocalAxis (main
axis).
RatioDenominator
INT
Reduction ratio denominator
Field is only valid, if Slave=AXIS_REF_LocalAxis (main
axis).
Acceleration
DINT
Value of acceleration / deceleration (always positive) until
the synchronism is reached [Units/s²] <value range> (see
page Fehler! Textmarke nicht definiert.)
VAR_OUTPUT
InGear
BOOL Synchronicity achieved
CommandAborted
BOOL Command aborted
Error
BOOL Error while executing module
Note:
Behaviour: the drive accelerates (with Acceleration) until the master speed is
reached - the module will report synchronicity with "InGear". Position losses
during acceleration to master speed are not made up.
The transmission ratio can be changed at any time with a positive edge on
Execute. InGear is reset until synchronicity is achieved again.
For example, if speed synchronicity is not achieved because of limiting effects,
the position difference that arises will be made up (by the active position
controller).
Acceleration / deceleration to the set transmission ratio takes place without a jerk
limit.
If the master and slave units do not correspond, this fact must be considered for
the transmission ratio.
Example (see page 83)
Master : AXIS_REF
Slave : AXIS_REF
Master : AXIS_REF
InGear : BOOL
CommandAborted : BOOL
MC_GearIn
Slave : AXIS_REF
Execute : BOOL
RatioNumerator : REAL
RatioDenominator : INT
Acceleration : DINT
Error : BOOL

 Loading...
Loading...









