Parker EME
Motion control
192-121102 N04 June 2008 259
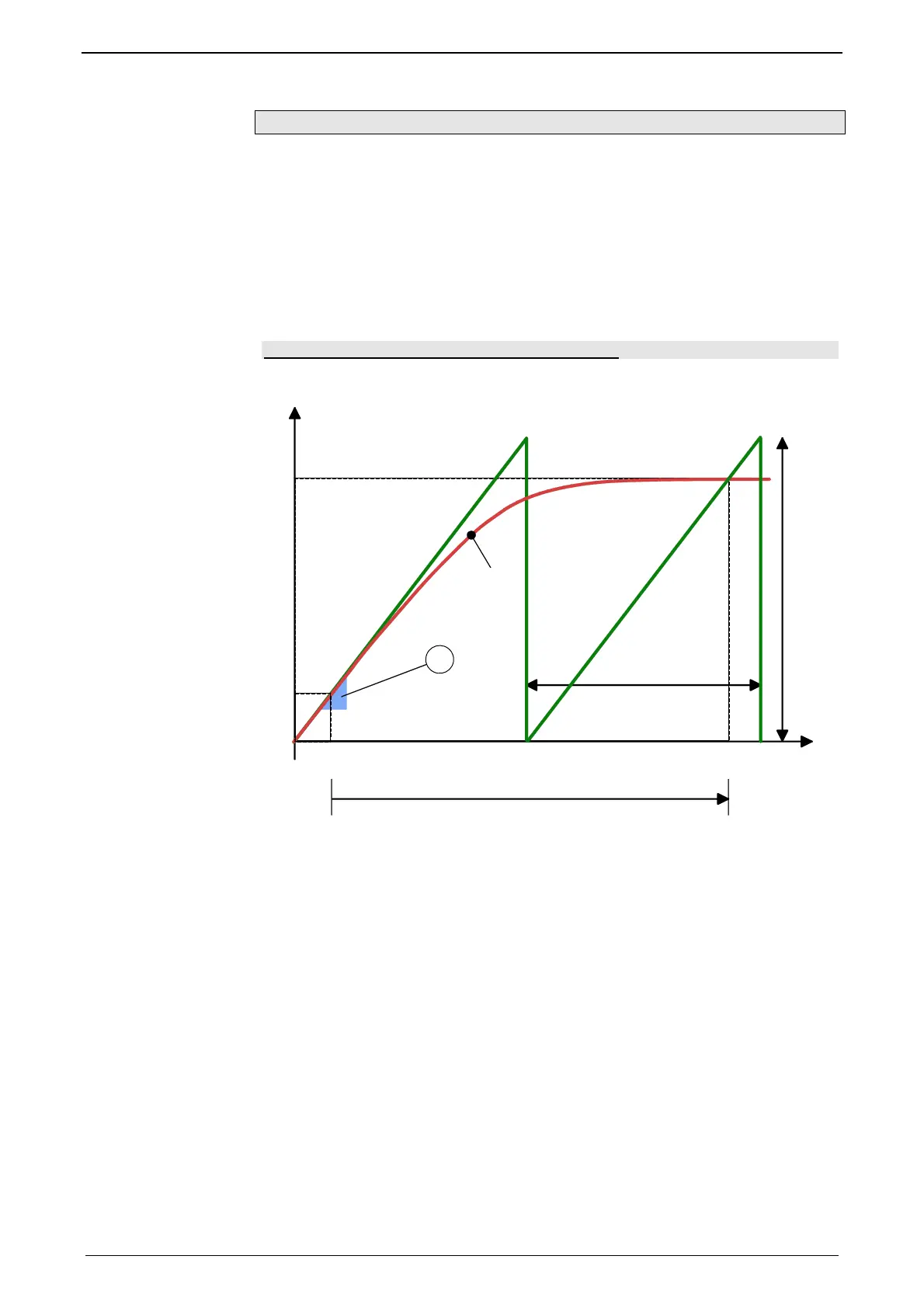
Quadratic decoupling (CouplingMode = 1)
The quadratic decoupling results in a quadratic position course of the slave axis
without velocity superelevation:
The braking position (MB) is calculated from the slope of the curve at the
decoupliing point and the standstill position (S0) so that a quadratic position course
is the result.
If the standstill position is smaller than the slave position at the beginning of the
decoupling, the decoupling movement will only be terminated in the following cycle.
For this, there
must be a positive slope (gradient) at the decoupling position.
The master speed must be positive, i.e. the master position must be rising.
Decoupling over several master clock distances
If the slope (gradient) of the curve in the decoupling point is very flat, the
decoupling sequence will take several master clock distances.
M
S
Sa
0
ST
MT
S0
MA MB
0
a(M)
1
M
S0: Slave standstill position
Sa: Slave position at the master decoupling position
MA: Master decoupling position
MB: Master braking position
MT: Master clock distance
ST: Slave clock distance
a(M): quadratic decoupling function
1: gradient triangle: determines the duration of the decoupling sequence (the
steeper, the faster is the coupling sequence)

 Loading...
Loading...







