Parker EME
Communication
192-121102 N04 June 2008 411
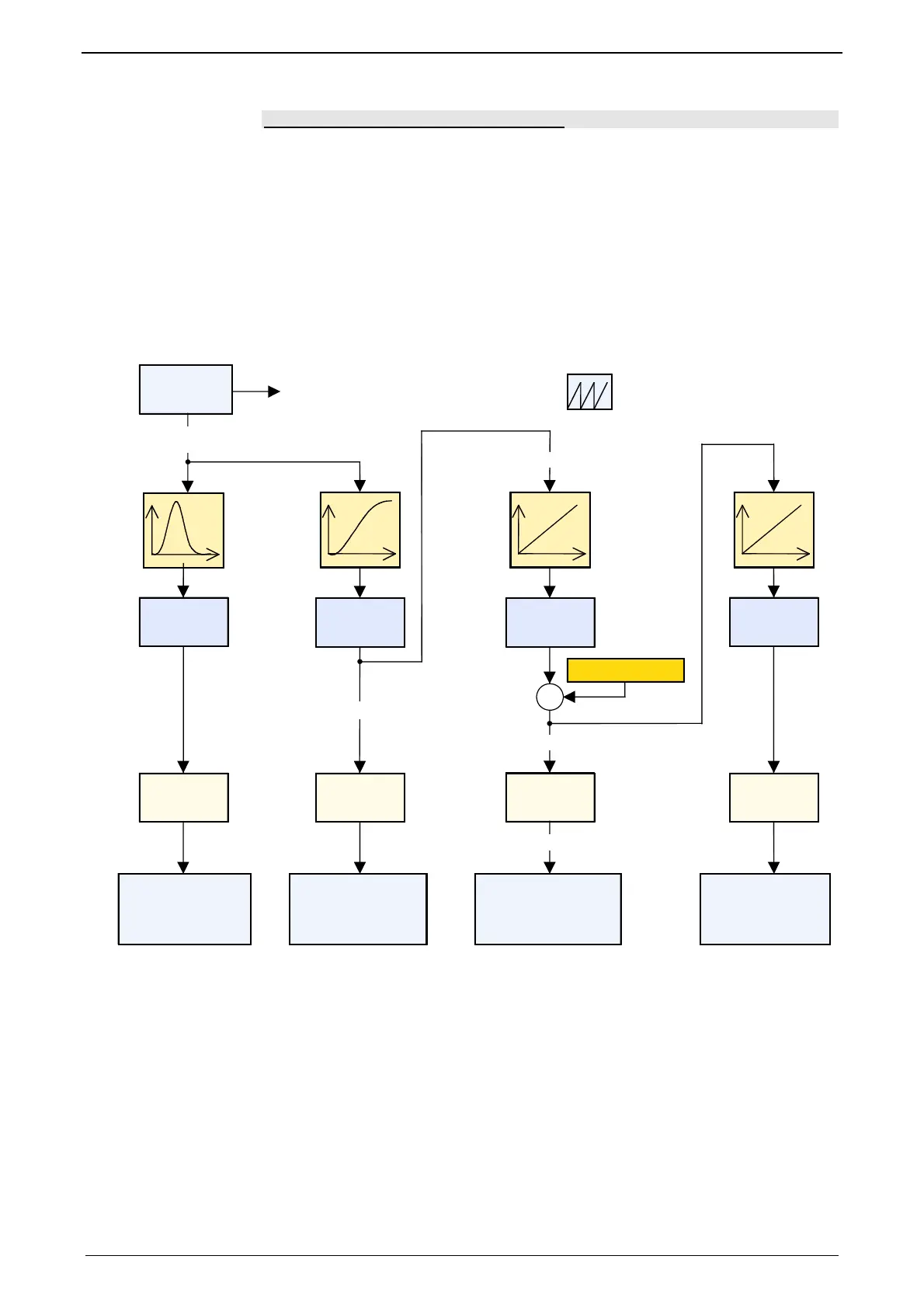
Example 2: 4-axis application with HEDA
Task:
four-axis processing machine
Setting the steps via virtual master
Forwards and backwards movement with the master (closed curve)
Linearized feed movement with Slave 1 = rotating blade (open curve)
Position synchronous operation of slave 2 with respect to slave 1 with slip
correction (use of C3_Shift_Position)
Fixed position assignment of a turning axis slave 3 to slave 2 with consideration
of the correction movement of slave 2
Virtual
Master
Control
Loop
C3Plus.ProfileGenerators_SG1Position o2000.1
C3Plus.PositionController_DemandValue o2200.1
C3Plus.ProfileGenerators_PG2Position o2000.2
HEDA_SignalProcessing_Input o3920.1
Master
Gearbox: i=10
Travel Distance per
Revol: 127/10
Slave 1
Gearbox: i=5
Travel Distance per
Revol: 233/5
Slave 2
Gearbox: i=3
Travel Distance per
Revol: 100/3
Slave 3
Gearbox: i=7
Travel Distance per
Revol: 360/7
C3.StatusPosition_DemandValue2 o680.2
C3Plus.PositionController_ActualValue o2200.2
100
0 360
100
0 360
100
0 100
360
0 100
360
0
Control
Loop
Control
Loop
C3_ShiftPosition
Control
Loop
Setpoint
Generator
Setpoint
Generator
Setpoint
Generator
Setpoint
Generator
Setpoint
Generator

 Loading...
Loading...







