Motion control C3F_T40
250 192-121102 N04 June 2008
Note:
Master coupling position (ME) and master synchronized position (MS):
With CouplingMode = 0: ME is taken into consideration, MS not relevant.
With CouplingMode = 1: ME is calculated internally, MS is taken into
consideration.
With CouplingMode = 2: ME is taken into consideration, MS is taken into
consideration.
With CouplingMode =1 the curve must be constantly rising at the Master
synchronous position (MS).
If the master runs backwards after the beginning of the coupling movement, the
slave will be at its original position after reaching the coupling position.
With changeover, the coupling function depends on the current curve.
The relevant master position for coupling position and synchronized position is
object 3030.24.
Before C3_CamIn is executed, a curve must be selected with
C3_CamTableSelect.
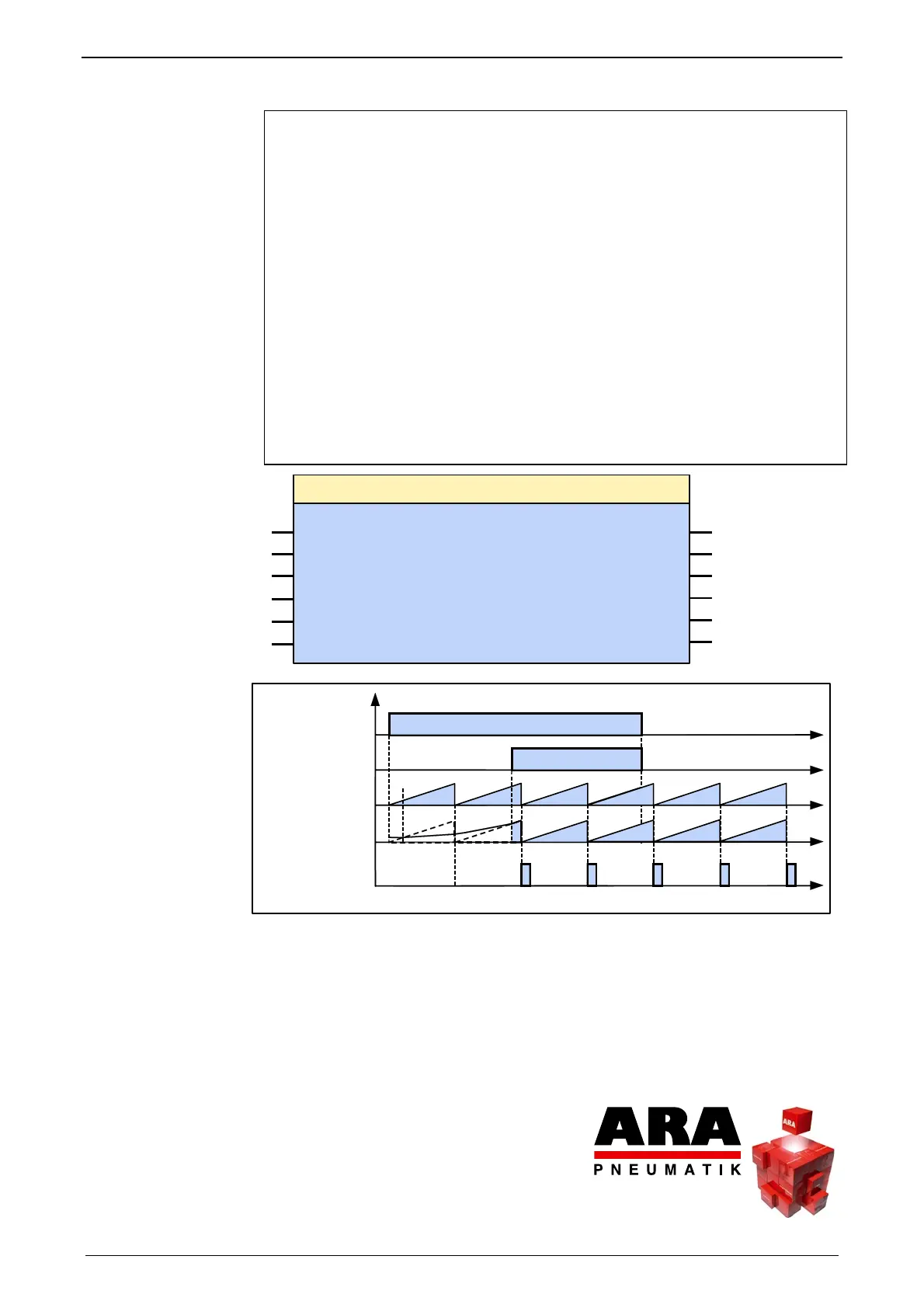
InSync : BOOL
C3_CamIn
Master : AXIS_REF
Slave : AXIS_REF
Master : AXIS_REF
Slave : AXIS_REF
Execute : BOOL
CommandAborted : BOOL
Error : BOOL
EndOfProfile : BOOL
CouplingMode : INT
CouplingPosition : REAL
SyncPosition : REAL
Execute
Masterzyklus
t
t
t
1
0
1
0
1
0
InSync
Slavezyklus
1
t
1
0
EndOfProfile
t
1
0
ME
MS
Example with CouplingMode = 1 and C3_CamTableSelect: Periodic = TRUE.
Autoryzowany dystrybutor Parker:
53 -012 Wrocław
ul. Wyścigowa 38
tel. 71
fax
71
w w w . a r a p n e u m a t i k . p l
364 72 82
364 72 83

 Loading...
Loading...







