Atmospheric Pre-aligner Manual
4000-0015 Rev 1
53
Alternatively, you can send commands in Terminal mode from either a
Teach Pendant or EQT 32.
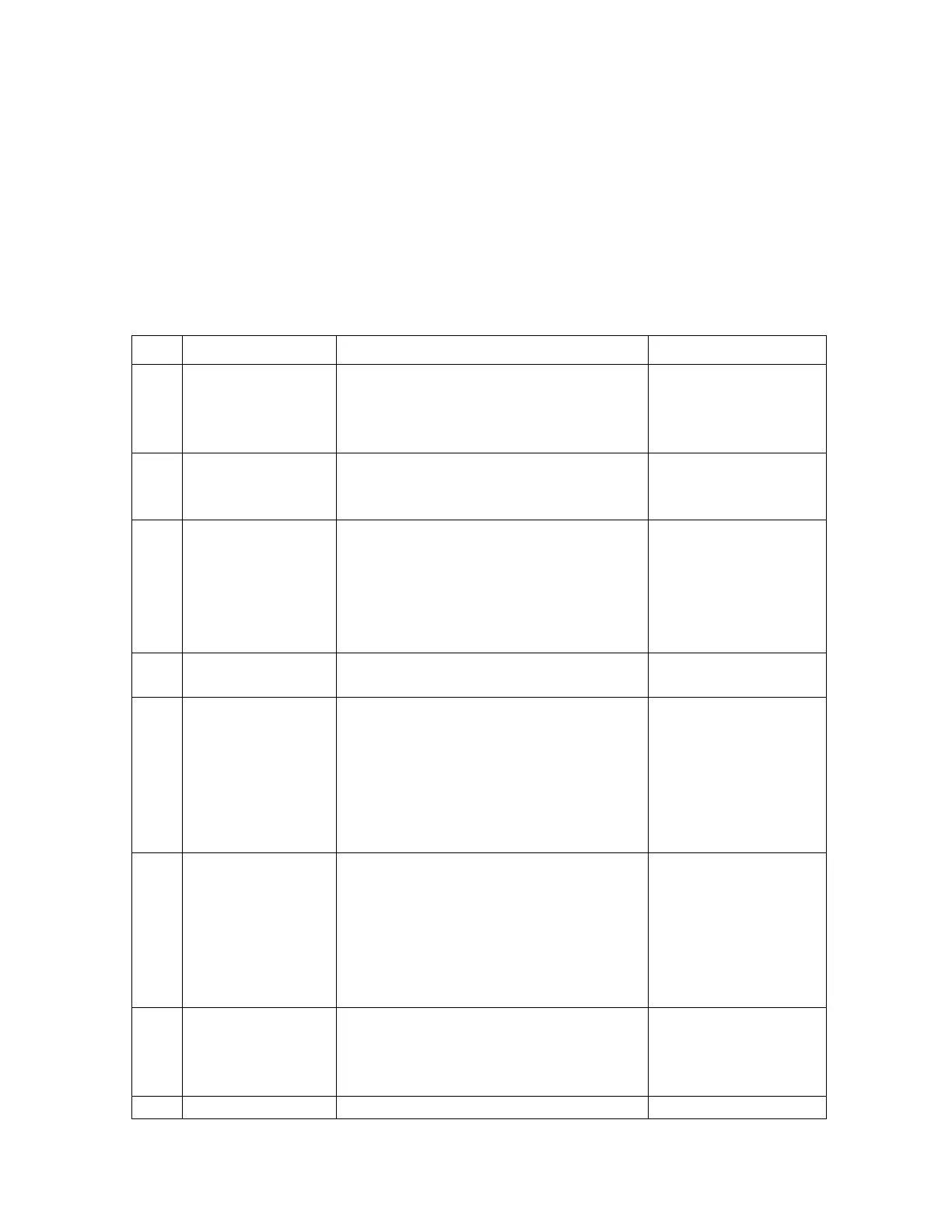
Cause and Recovery for STAT Messages
The setting of each status bit is caused by one or more reasons.
Sometimes the cause is fatal and needs immediate action to recover, and
sometimes the cause is harmless and does not require any direct action.
The following table lists the probable cause of the problem and suggested
recovery for each of the 16 status bits.
Bit Message Cause Recovery
0 Previous
command not
executed
The command cannot be executed for
the current condition. For example, a
SVON command cannot execute while
axes are moving. Also see Bit 2.
Review the
command and the
conditions.
1 Previous
command invalid
The command is unknown or has
invalid syntax. When Bit 1 is set to 1,
Bit 0 is also set to 1.
Check command
syntax.
2 Robot vacuum
sensor is activated
Vacuum sensor is on; an object is
detected. When Bit 2 is set to 1, Bit 3
should be 1 (vacuum switch is on). If
Bit 2 is 1 regardless of presence of
object or status of Bit 3, the vacuum
sensor is too sensitive.
Adjust the vacuum
sensor on the robot.
(For pre-aligner
vacuum testing, use
the Pre-aligner
Diagnostics.
3 Vacuum switch is
ON
A normal condition. For example, a
GET or PUT command turns Bit 3 on.
None.
4 Motor error on
one or more axes
One or more axes have a position error
condition. Excessive force has been
applied to the force generated by the
motor. An obstacle might be in the
path. Or, the Servo Error Limit (ER) is
too small. See also Bit 10.
Clear the obstacle,
send the SVON
command, and
continue. If ER is too
small (usually about
100-200), change the
setup and increase.
5 One or more limit
switches are
triggered
A limit switch can be positive or
negative. Use the RLS command to
display detailed information on limit
switches.
Send the RLS
command to
determine which
limit switches are on
or triggered and
move away from
them.
6 One or more axes
are not homed yet
With this condition, the controller will
not allow a Move command on the
axes. Power up or disconnection of the
signal cable sets this bit to 1.
Get controller ready
to Home and then
HOME the pre-
aligner.
7 Pre-Aligner error This indicates a general error in See ALST command.