Vacuum Robot Manual
4000-0315 Rev 1
54
4. If the Distance to Index is bad, you are prompted to move the axis to a
GOOD position. This is the position where you can release the belt
directly attached to the motor. Press ESC to start over or ENTER to
continue.
5. You are prompted to lock the axis so it cannot move. Release the belt.
When you are finished, press ESC to start over or ENTER to continue.
6. While the motor is moved to position, the display reads MAKING
CORRECTION…
7. When the correction is done, you are prompted to replace the belt.
After the belt is replaced, press ENTER.
STEP #9 (R-HOME TEST & SET)
Step #9 consists of three substeps:
• Setting the physical position at the Home switch
• Adjusting the physical position at the Index
• Setting the home offset.
Use only the first two substeps to constrain the physical position at home
switch and at index.
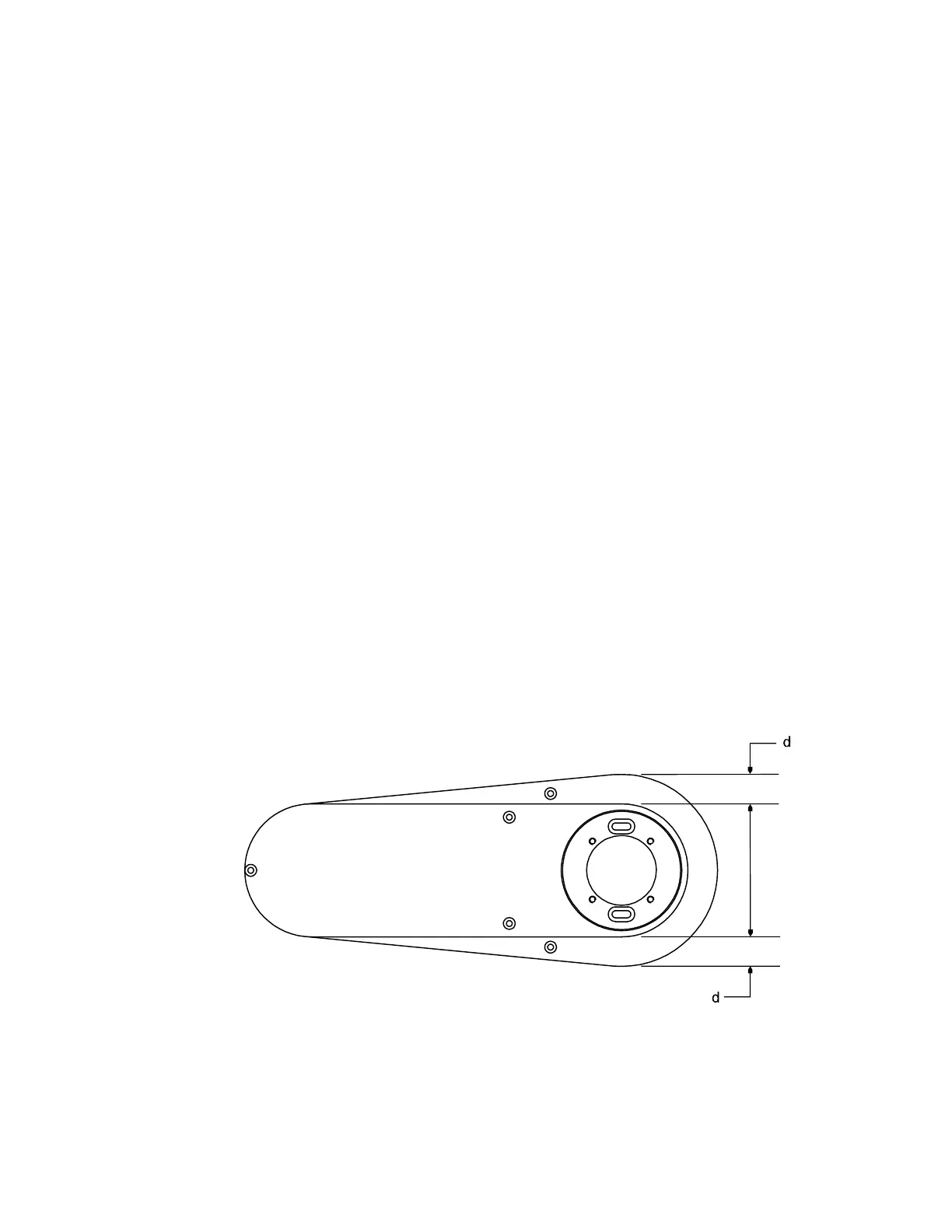
Adjust the Home Offset so that when the R-axis is at 0, the arm links are
in the Center Overlapping Position (COP). In COP, the upper link
overlaps exactly over the center of the lower link.
For instructions on adjusting the radial arm, refer to the procedure on page
32.
Center Overlapping Position (COP)