Vacuum Robot Manual
4000-0315 Rev 1
28
Teaching Stations
Before teaching, determine your station names and axis assignments.
To determine your station names, apply a system to assist in keeping
stations easily identified. For example, for a dual end effector, use upper
case letters for end effector 1 and lower case letters for end effector 2.
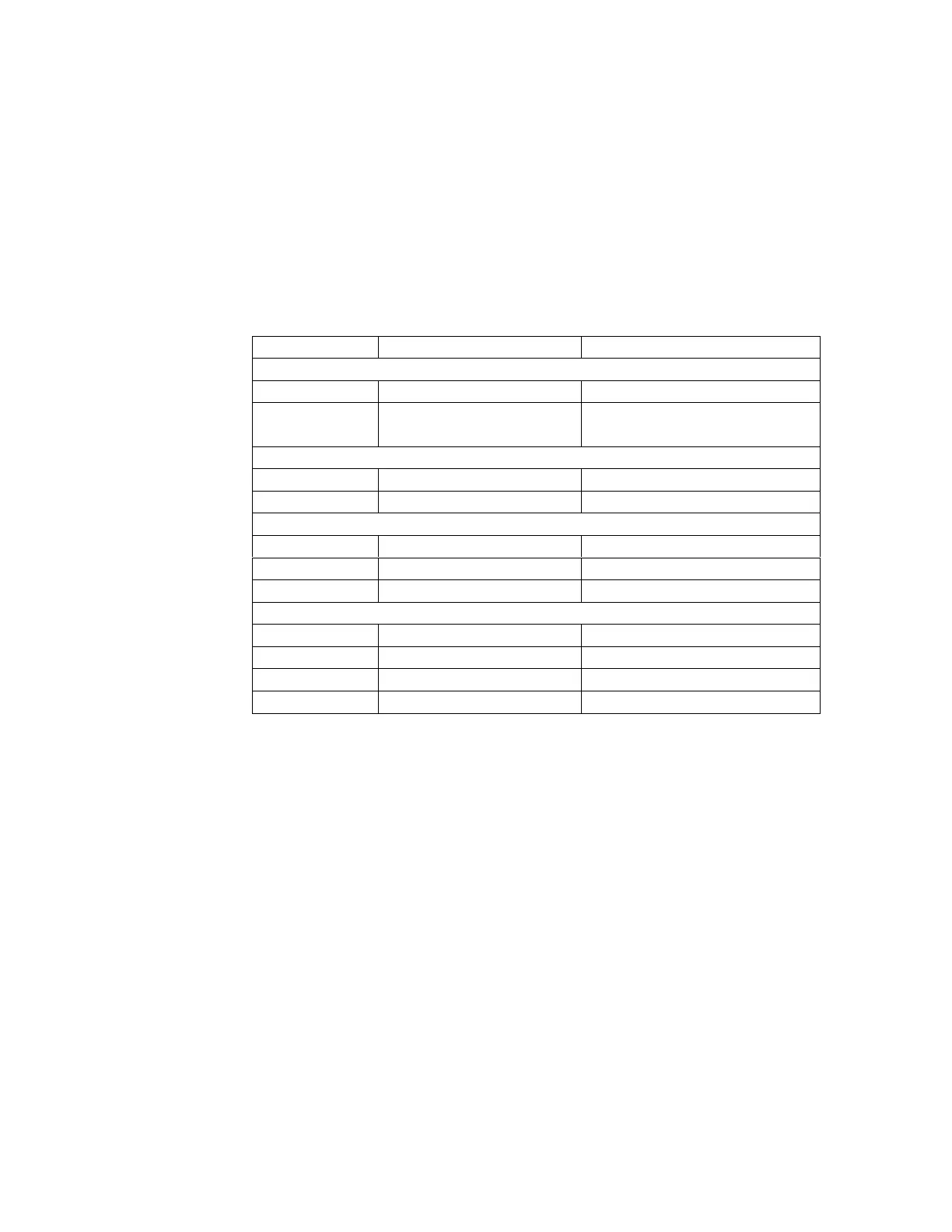
To determine your axis assignments, find your system in this chart:
Component Axis Assignment Parameter File (*.par)
Robot and Pre-aligner
Robot T, R, Z Robot
Pre-aligner W, unless t for an
ESC214
Pre-aligner, first column
Robot and Single-Axis Indexer
Robot T, R, Z Robot
Indexer Vertical axis is r Auxiliary, second column
Robot, Pre-aligner, and one Single-Axis Indexer
Robot T, R, Z Robot
Pre-aligner W Pre-aligner, first column
Indexer Vertical axis is r Auxiliary, second column
Robot, Pre-aligner, and two Single-Axis Indexers
Robot T, R, Z Robot
Pre-aligner W Pre-aligner, first column
Indexer 1 Vertical axis is r Auxiliary, second column
Indexer 2 Vertical axis is z Auxiliary, third column
Teaching a Robot Only
Use a Teach Pendant or EQT interface to teach the robot stations. General
steps are given here for teaching a robot-only system. For specific
information on how to use the Teach Pendant or the EQT interface for
teaching, refer to the Equipe User Interface Manual.
For the following example steps, there are two cassette stations, Station A
and Station B, and one stage position, Station C.
1. Place the wafer on the end effector.
2. Servo off the T and R axes.
3. Adjust the robot arm to face the first slot in the cassette for station A.
Do not push on the outer link! Raise or lower the Z axis. Adjust the R
and T axes until the wafer is inside the first slot of the cassette.