Vacuum Robot Manual
4000-0315 Rev 1
19
For more information about the INPUT command or I/O ports, refer to the
Equipe Software and Controller Manual. For information on commands
that request the status of various system parts, refer to the Troubleshooting
chapter in this manual.
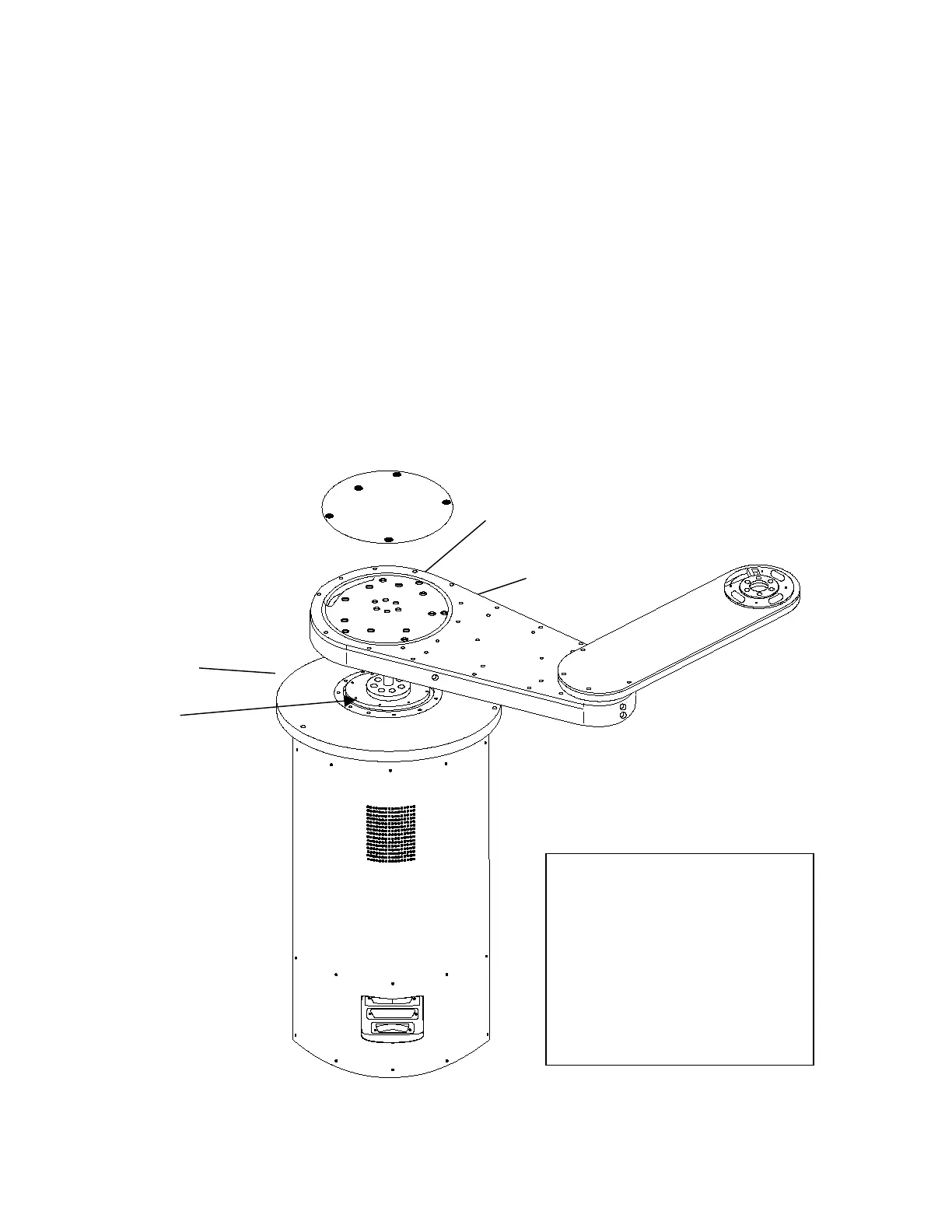
Attaching the Arm to a VAC514 Robot
For this procedure you will need an M5 metric wrench and two types of
screws provided by Equipe: eight ¼ 20 x 5/8 screws and five 4-40 x ¼
screws undercut by Equipe.
The arm assembly consists of the larger Inner Link and the Outer Link.
When attaching the arm assembly, you tighten the theta axis and the radial
access as indicated in this drawing of the Outer Link:
Link to
Outer Shaft
Link to
Inner Shaft
Inner Shaft
Outer Shaft
The Theta axis changes position
when the inner and outer shafts
move together in the same
direction and at the same speed.
The R axis changes position
when the outer shaft rotates and
the inner shaft does not move.