Strasbaugh nTellect (Model 7AF) Wafer Grinder
12 - 40 Version 1.2 - June 2004
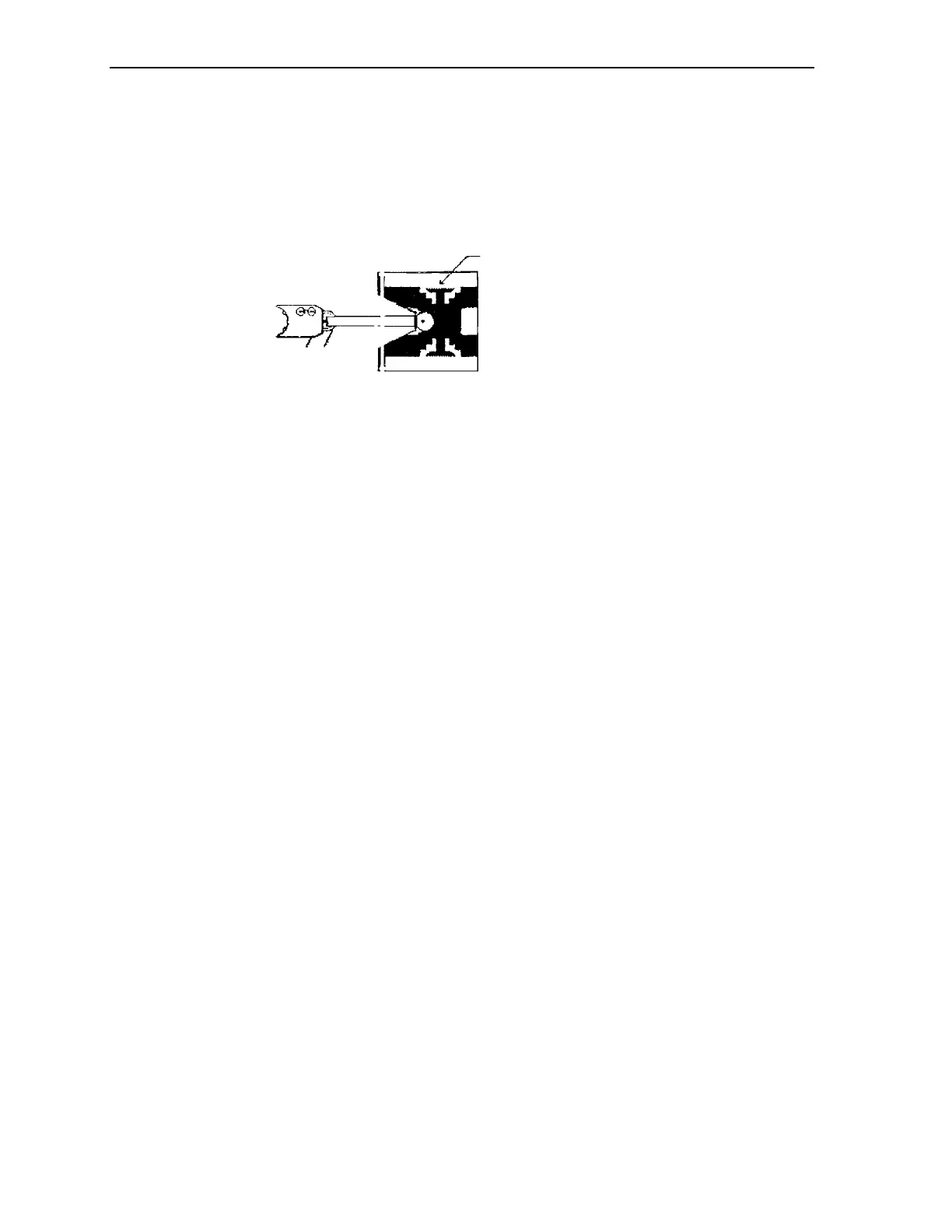
9. Gently move the robot arm in toward the cassette until the edge of the end
effector is just in front of the H-bar of the cassette, as shown in the figure
below.
Figure 12-5 Top View of Radial Positioning of Robot
H - Bar
10. Use the "SVON" command to turn on the motor, and then read the robot's
current position using the "RCP" command.
11. Record the current radius position.
Z-AXIS
12. Use the "MOVA T,[VALUE]" command to rotate the theta axis to the robot's
theta coordinate at the turret.
Note: Use the information recorded in Step 4., above, or issue the "RCS
[STATION]" command.
13. If the end effector is not positioned with the puck up, use the "FLIP 1"
command to rotate it to the correct position.