Atmospheric Single-Arm Robot Manual
4000-0016 Rev A
45
homed, EQT displays a status message. A status message or code of
1000 or 1008 indicates all devices are working. Refer to the
Troubleshooting chapter for more information on EQT 32 displays of
command responses.
Verifying Connections
When one or more cables within the controller are disconnected, the I/O
board registers the broken connection(s) on its port G. After making the
connection, check the status of port G with the command:
INPUT G
The INPUT command reads the value of the specified port and sends the
results over the RS-232 line. If you send the command from the Teach
Pendant, the results are displayed on the LCD screen. If you send the
command from EQT 32, the results are displayed on the command line.
Alternatively, you can read a specific bit rather than all eight bits. For
example, to read bit 2 of Port G, enter:
INPUT 10
A result of all zeroes indicates a good condition. If any 1s are returned,
refer to the following bit descriptions for Port G to determine the problem.
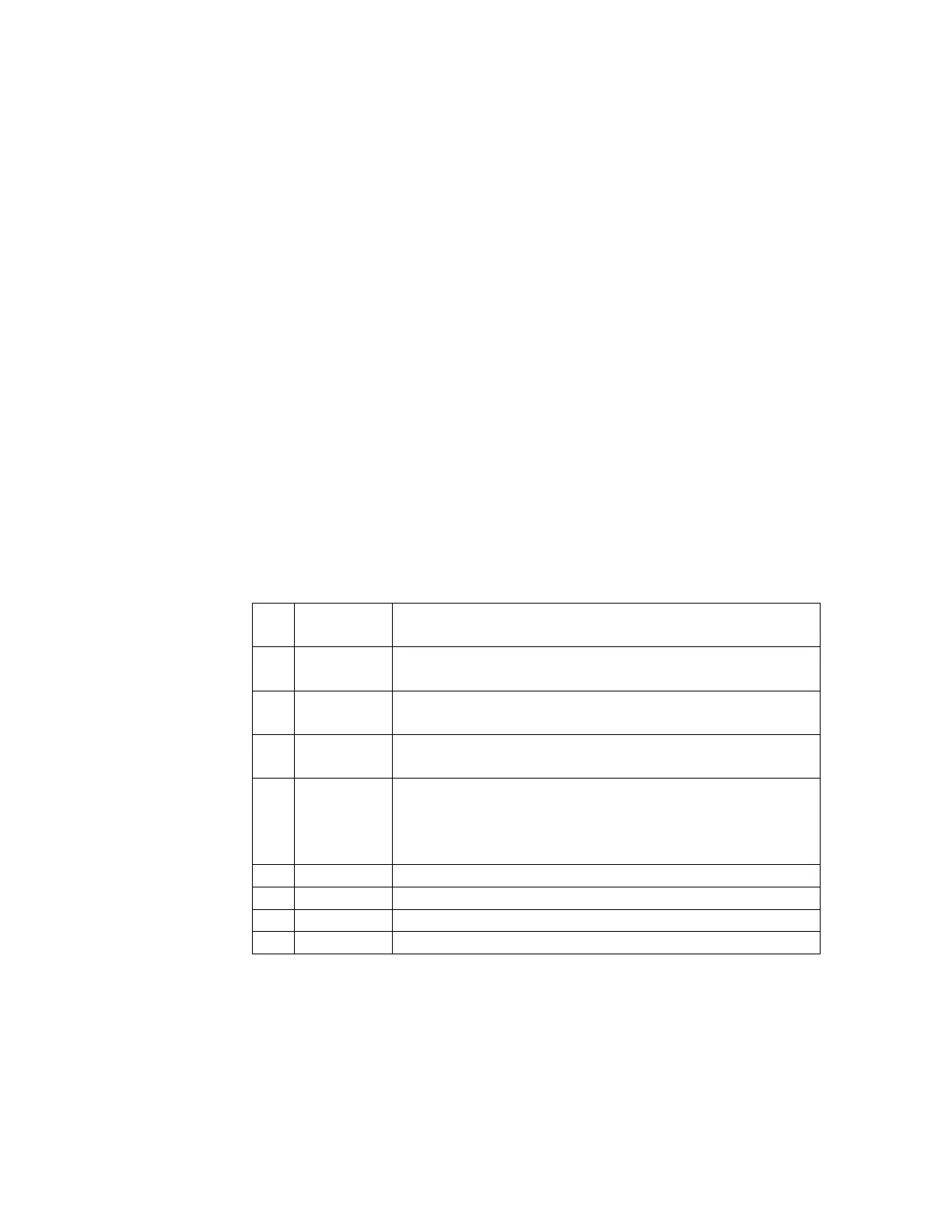
Bit INPUT
command
Connection
0 INPUT 8 Amplifier internal connection and signal cable closed
loop
1 INPUT 9 MOFF, emergency motor off input from customer I/O
connector on the robot I/O board.
2 INPUT 10 Stop input from the customer I/O connector on the
robot I/O board.
3 INPUT 11 Amplifier board under power. 0 indicates amplifier
power supply ok. 1 indicates amplifier board is not
receiving enough voltage from the linear power
supply.
4 INPUT 12 Motor power supply indicator.
5 INPUT 13 Robot interface board power supply.
6 INPUT 14 Switching power supply indicator.
7 INPUT 15 Bus power supply.
For more information about the INPUT command or I/O ports, refer to the
Equipe Software Manual. For information on commands that request the
status of various system parts, refer to the Troubleshooting chapter.