Vacuum Robot Manual
4000-0315 Rev 1
1
Overview of Vacuum Robots
PRI/OEM Systems vacuum robots are designed for use in vacuum
applications ranging from sub-atmosphere to 10
-7
T.
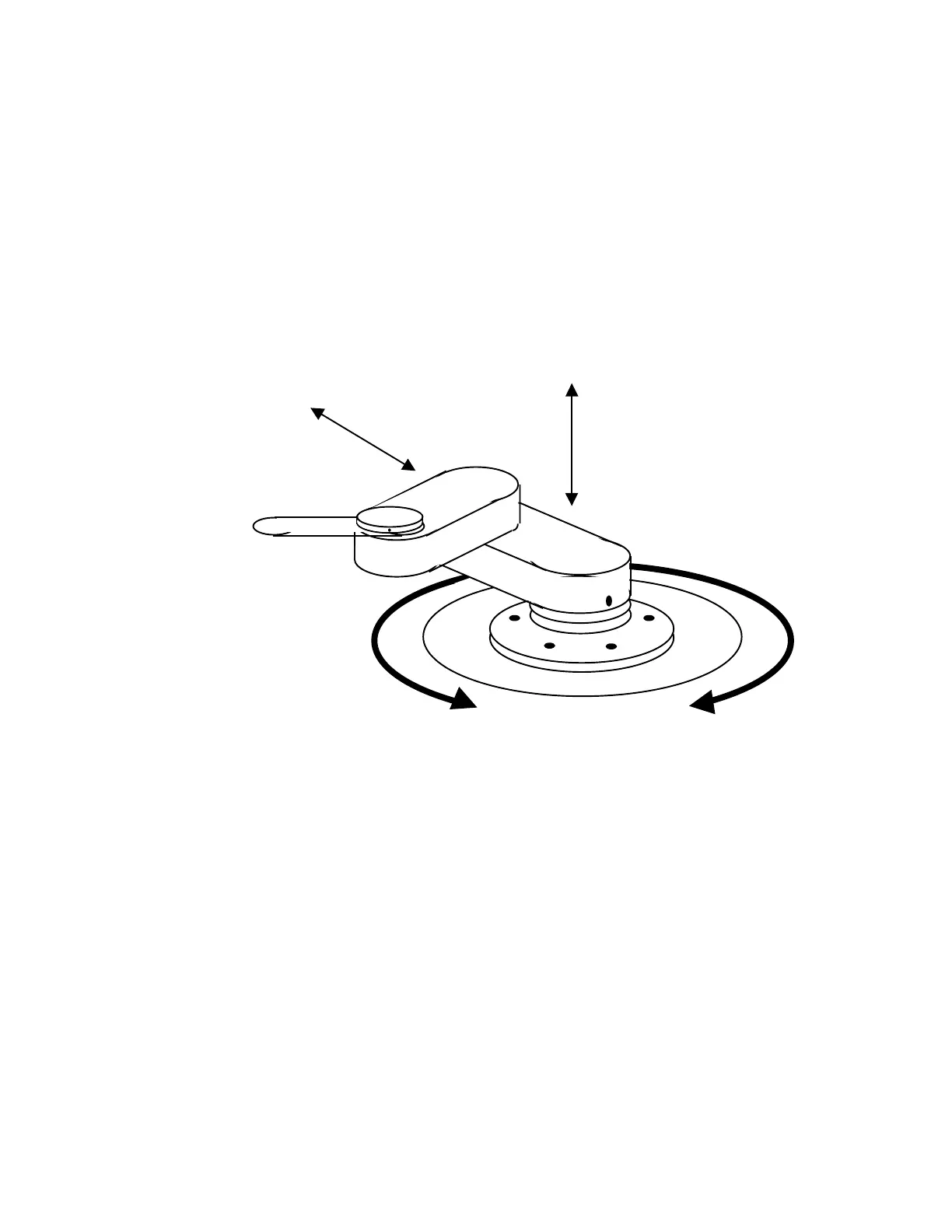
The robots use a three-axis system of motion:
• Theta (T) axis is defined as the rotation of the robotic arm.
• Radial (R) axis is defined as the “reaching” and “retracting” of the
robotic arm.
• Z axis is defined as vertical movement.
The polar coordinate positions are listed in the order T, R, Z.
Theta or Rotation
Z or Vertical
Radial or Reach
+
-
+
-
-+