Atmospheric Single-Arm Robot Manual
4000-0016 Rev A
1
Overview of Atmospheric Robots
Atmospheric robots are designed for use under normal atmosphere and
vacuum robots are designed for use under high vacuum. Although the
robots are similar, the vacuum robot functions within the confines of a
vacuum mini-environment. Unlike the atmospheric robot, the vacuum
robot cannot use a laser scanner and does not need a vacuum valve for the
arm. The vacuum robot uses a different interface board than an
atmospheric robot. Therefore, this manual does not apply to vacuum
robots.
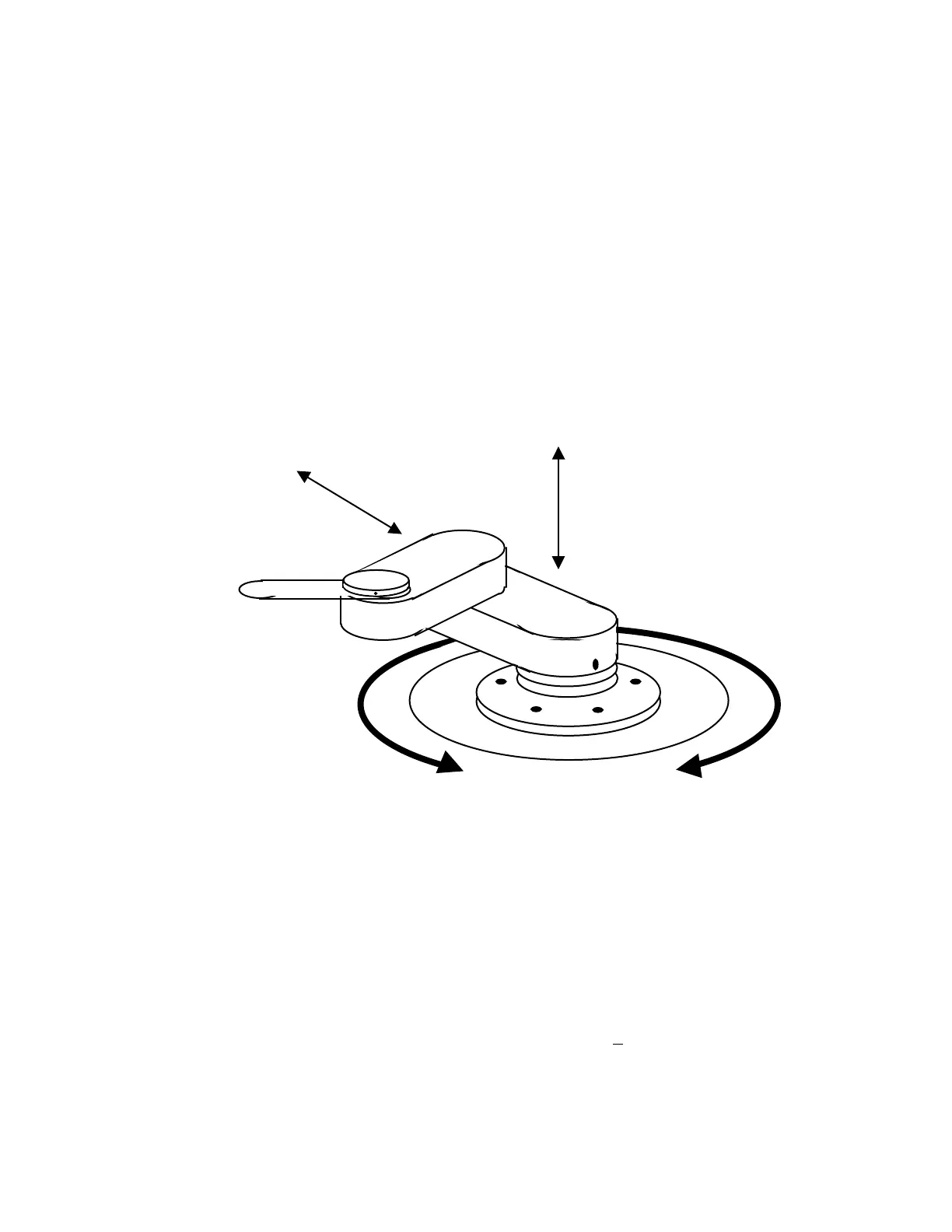
Equipe robots use a three-axis system of motion:
• Theta (T) axis controls rotation of the robotic arm,
• Radial (R) axis controls “reaching” and “retracting” of the robotic arm,
• and the Z axis controls vertical movement.
The polar coordinate positions are listed in the order T, R, Z.
Equipe robots are Class 1 cleanroom-compatible. Robot mechanics are
free of backlash, resulting in 3σ repeatability of +25 microns. The low-
inertia design enables rapid motion without sensitivity loss in the closed-
loop DC-servo system. There are no motors above the mounting surface
and the robots have only sealed cleanroom motors, belts, and pulleys.
Theta or Rotation
Z or Vertical
R
a
d
i
u
s
o
r
R
e
a
c
h
+
-
+
-
-+