Atmospheric Single-Arm Robot Manual
4000-0016 Rev A
74
Home Test and Set
Each robot motor is factory set such that the distance between the home
switch and the encoder index is always between 1/3 and 2/3 of a motor
revolution away. This is critical for maintaining repeatability of the home
position of each axis at a given mechanical calibration.
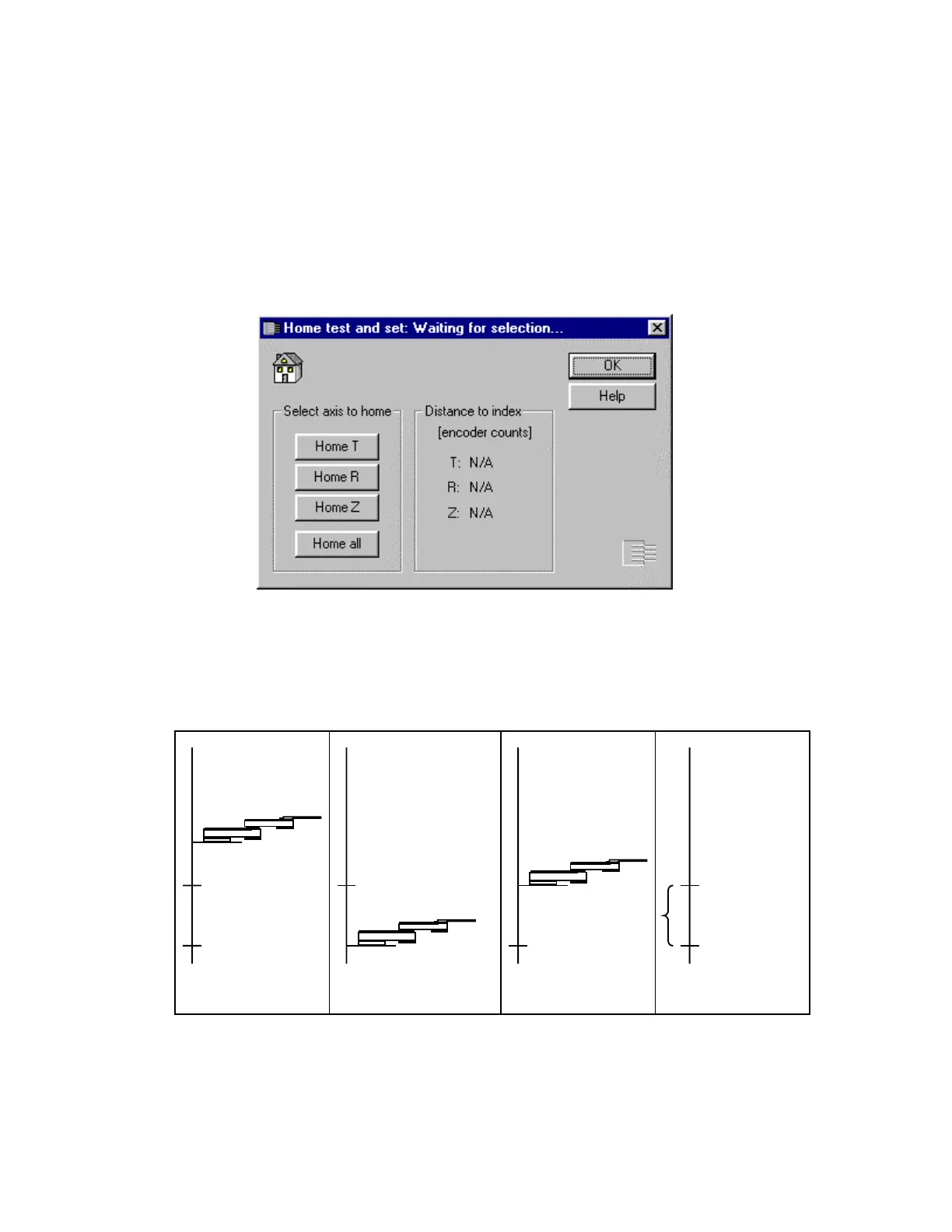
In the following graphic, the robot Z axis is homed. The homing
procedure moves an axis to its home switch and then moves in the
opposite direction to find the encoder index. (The encoder index is up to
one encoder revolution mark).
If the Distance to Index is too short, the controller can miss the first
occurrence of index signal because it occurs too soon after the home
switch signal. Thus, the motor is required to move one more revolution to
generate the signal. At a particular distance, this doesn’t happen every
4. Distance to Index
Home Switch
2. Move to Home Switch
1. A starting position
Index Index
3. Move to Index
Home Switch
Index
Home Switch