Atmospheric Single-Arm Robot Manual
4000-0016 Rev A
68
Diagnostics for the Robot
Step-by-step instructions are given for both the Teach Pendant and EQT
32 in this section. If you need basic how-to information for either the
Teach Pendant or EQT 32, refer to the Equipe User Interface Manual,
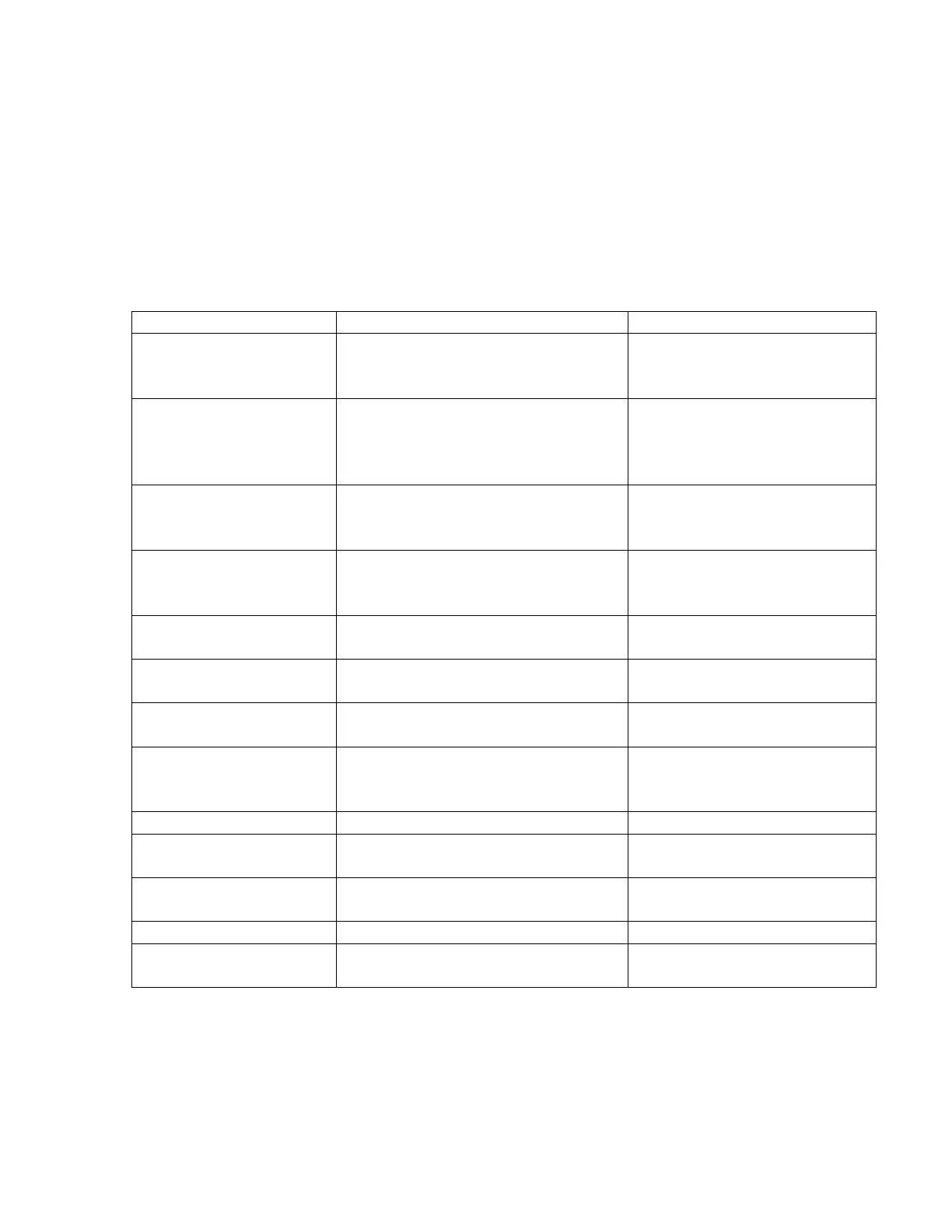
Document Number 4000-0017. The diagnostic steps are summarized in
the following table.
Step Purpose Warnings and Cautions
1. NVSRAM Verify that NVSRAM is correctly
formatted and all required files are
available.
2. Galil and I/O Verify that the Galil motion control
board and I/O ports are functioning
correctly. If you cannot turn a servo
motor on and off, test the I/O board.
If this test fails, you will often
not be able to run any other
steps.
3. Encoder Read Verify that the controller receives
the correct encoder feedback from
the robot.
Make sure the robot signal
cable is securely connected.
4. Limit and Home Test the limit and home switches. Before you move the axes,
make sure the robot signal
cable is securely connected.
5. Amplifier Board
Setup
Do not use. Do not use. Not available on
EQT 32.
6. Amplifier Module
Setup
Do not use. Do not use. Not available on
EQT 32.
7. Servo Use only if Encoder Read test
passed.
8. Home Test & Set Use if belt slipping is suspected or
after replacing robot parts that
require detaching belts.
All belts, pulleys, motors, and
so on are securely attached.
9. R-Home Test & Set Set home flag and home offset.
10. Scaling Factor View the absolute position as
determined by the mechanical ratio.
11. Vacuum
Valve/Sensor
Verify the vacuum I/O and adjust
the sensor.
12. Robot I/Os Verify customized external I/O.
13. Scanning Test the laser scanner and laser
sensor.
Do not look at the laser beam!