Parker EME
Setting up Compax3
192-121102 N04 June 2008 103
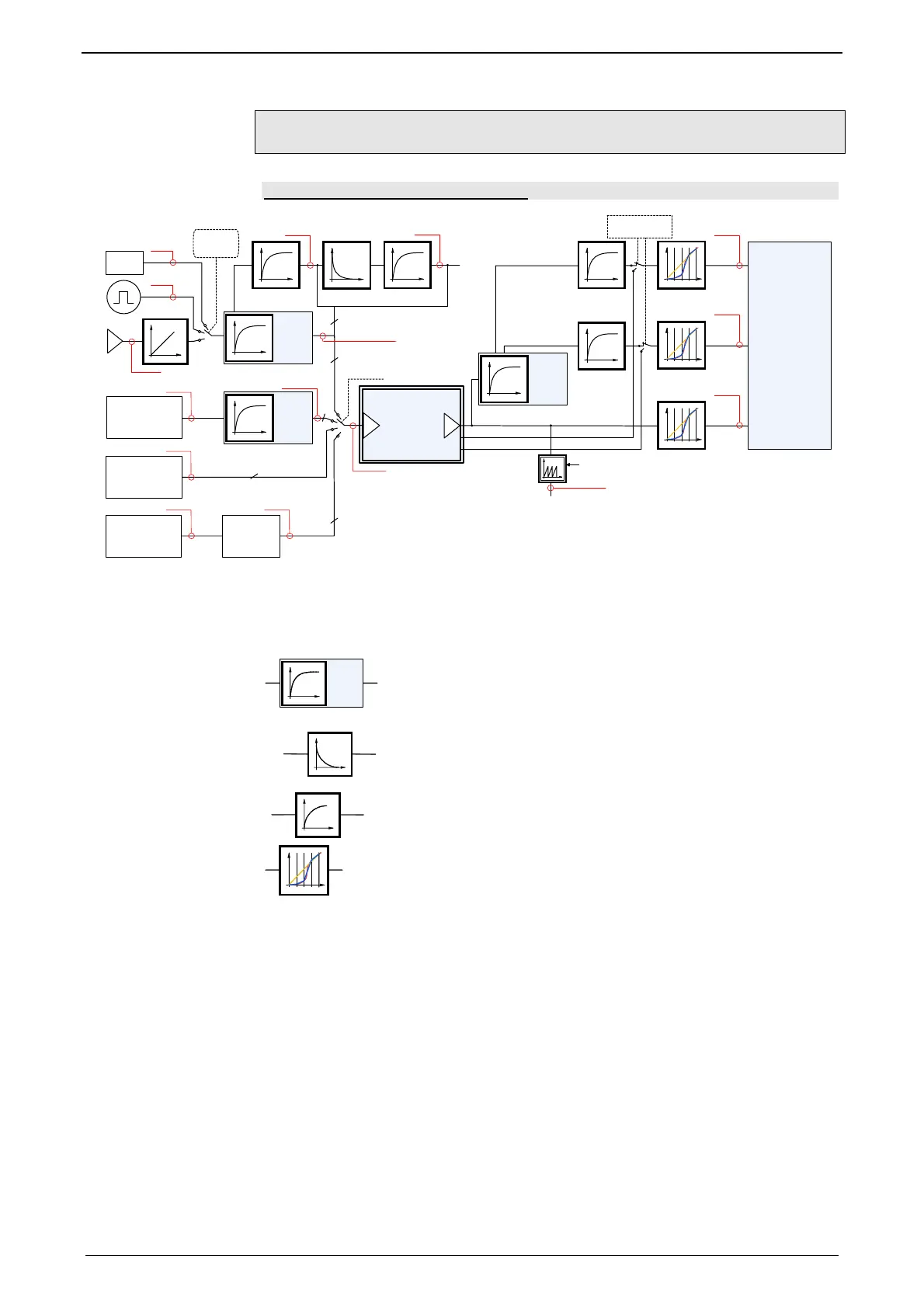
Signal filtering for external setpoint specification and electronic
gearbox
Does not apply for Compax3I11T11!
C3SM
Wizard
HEDA
interpolation
500s => 125s
interpolation
500s => 125s
interpolation
500s => 125s
C
o
n
t
r
o
l
s
t
r
u
c
t
u
r
e
681.4
682.4
680.4
2110.7
2110.6
TRF
Physical
2107.1
TRF
HEDA
2109.1
+/-10V
B
position
speed
accel
speed
accel
3920.1
3920.7
2020.2
2020.3
2011.4
2011.5
accel
speed
680.10
2020.1(x)
CANSync
PowerLink
EtherCat
Inter-
polator
3921.1 3921.7(x)
680.25
Virtual
Master
SSI
680.12
TRF
SG1
2110.1
685.3
RS
D
E
Structure
of Gearing
2000.2, .5, .8
1141.7 (x)
1141.8 (v)
1141.4
2(v,a)
3(x,v,a)
3(x,v,a)
3(x,v,a)
1141.10=true
if v,a exist
x
a
v
t
r
u
e
t
r
u
e
1(x)
2
6
4
5
B: Structure image of the signal processing
D/E:
Structure of Gearing (see page 196)
Control structure
Symbols
TRF
2110.1
Trackingfilter
The displayed filter influences all outputs of the tracking filter.
Number: Object number of the filter characteristic
Differentiator
Output signal = d(input signal)/dt
The output signal is the derivation (gradient) of the input signal
Filter
Number: Object number of the filter characteristic
interpolation
500µs => 125µs
Interpolation
Linear Interpolation.
Values in the 500µs grid are converted into the more exact time
grid of 125µs.
Note:
A setpoint jerk setpoint feedback is not required for external setpoint
specification.
The description of the objects can be found in the object list (see page 414).

 Loading...
Loading...







