Parker EME
Setting up Compax3
192-121102 N04 June 2008 143
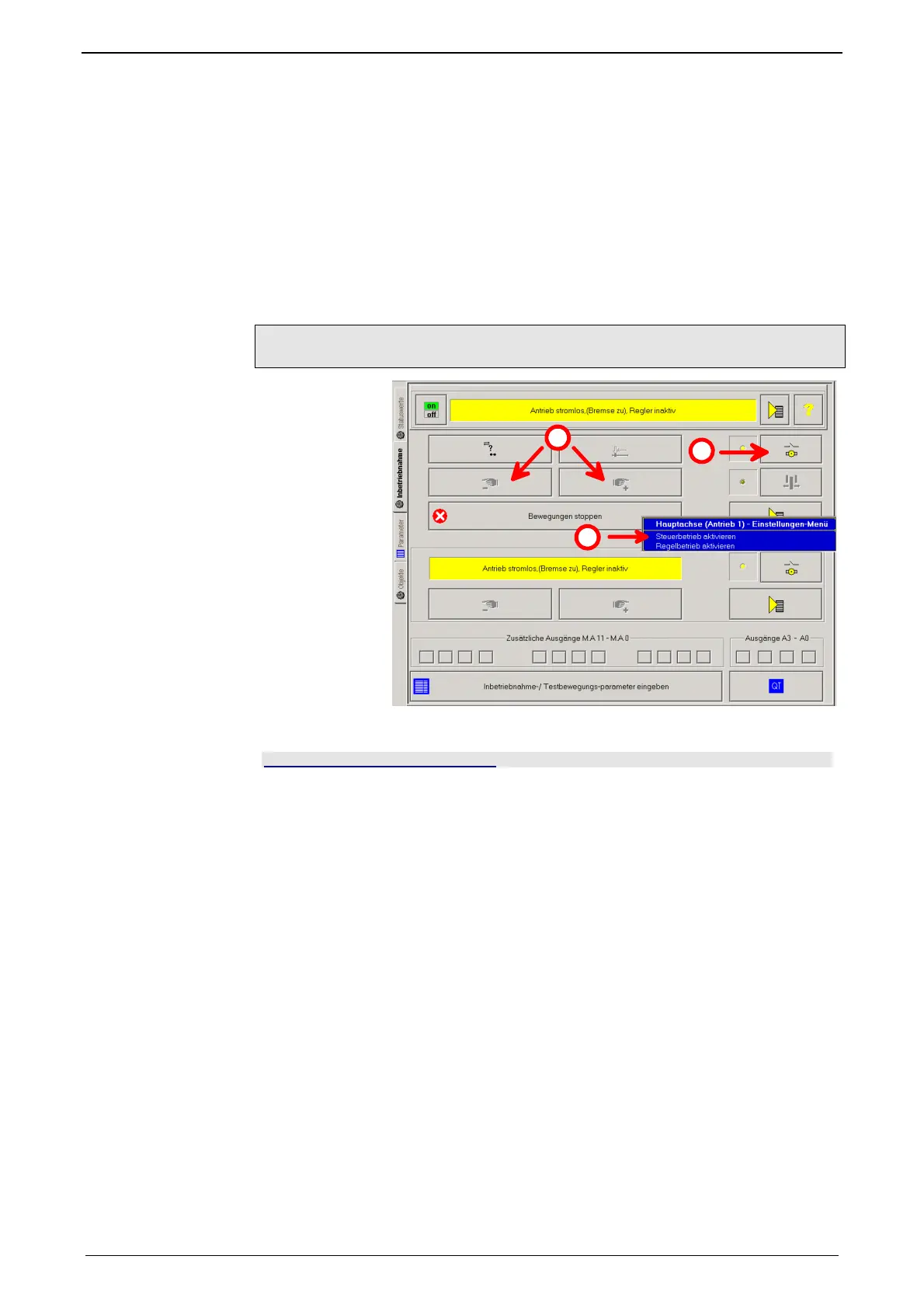
Close control loop
Switch drive to currentless (2)
Select control operation (1)
Re-energize drive (2)
Move drive at low speed in manual mode (jogging) (3).
In the event of oscillations, stop the movement
Does the drive oscillate at standstill?
Yes: Switch drive to currentless (2)
Reduce control parameters (Proportional factor KP (see page 143) to
acceleration feedback (see page 144)).
2
1
3
Set control parameters
In this chapter you can read about:
Proportional factor KP...................................................................................................... 143
Integrator KI ..................................................................................................................... 144
Speed feedback............................................................................................................... 144
Acceleration feedback ..................................................................................................... 144
In the optimization tree under position controller main axis
Proportional factor KP
Increase Kp (2200.38/2260.22) at lowest speed up to the stability limit.
Value will be preassigned by the configuration.
Acceleration and jerk must be adapted to the potential of the axis.
Deceleration and jerk_deceleration must be adapted to the potential of the axis.
Compensate unbalances with direction-dependant gain.
Check settings at 50% Vmax and reduce if needs be.
Check settings at Vmax and reduce if needs be.

 Loading...
Loading...









