Motion control C3F_T40
238 192-121102 N04 June 2008
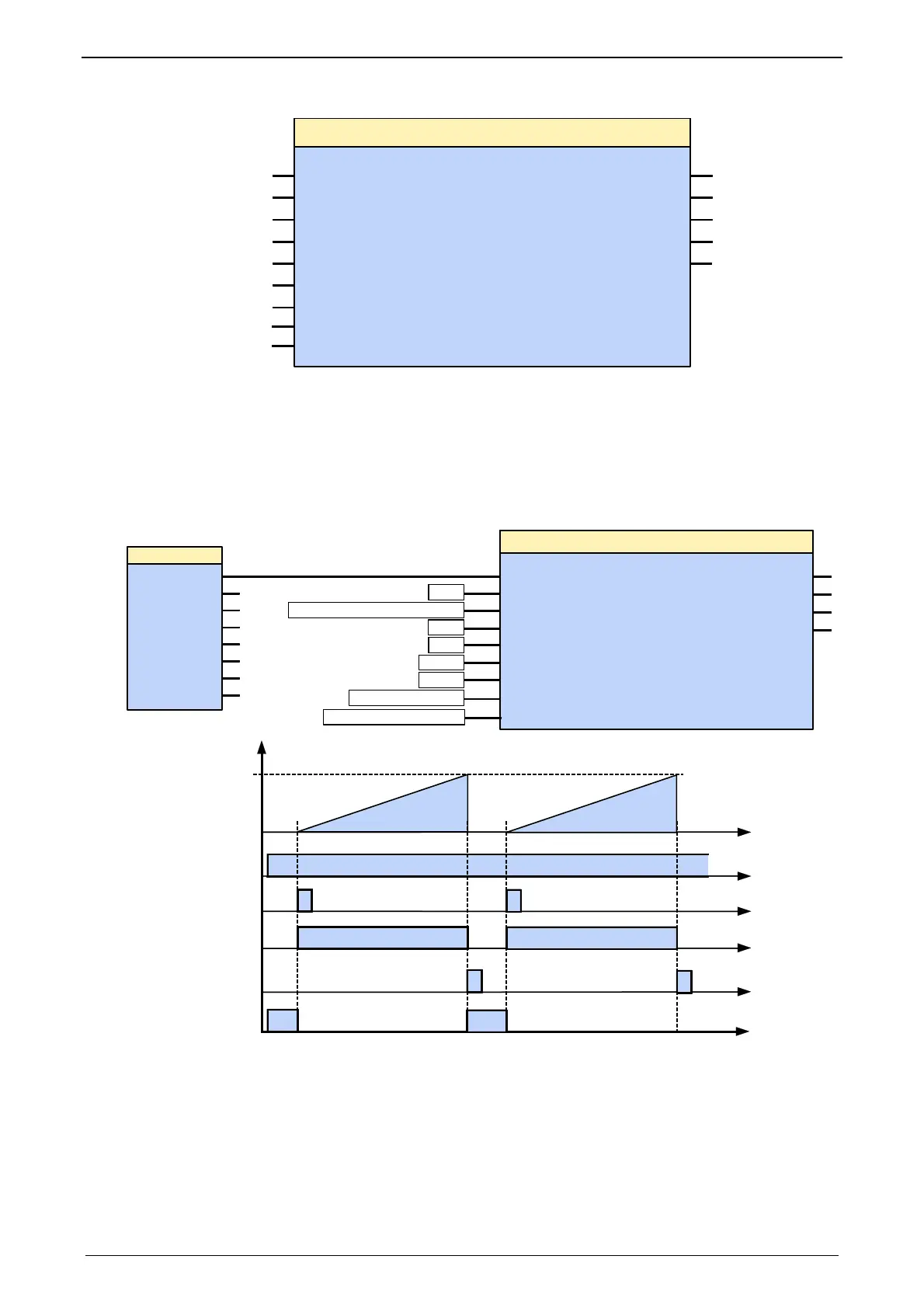
Enable : BOOL
StartMode : INT
Status : BOOL
Error : BOOL
C3_MasterControl
Busy : BOOL
StartSource : DWORD
StartMask : WORD
StopMode : INT
Periodic : BOOL
Master : INT
EndOfProfile : BOOL
BackStop : BOOL
Slave : AXIS_REF
Slave : AXIS_REF
Enable of the master position acquisition with input I0.
Start of the detection with an external event = rising edge at the I1 input.
Input I1 is selected via the object "C3.DigitalInput_Value”.
The input I1 is placed on Bit 1 (counting from 0), as a result the input
"StartMask” receives the value 2.
Detection runs in single mode.
Masterposition
I1
t
t
t
0
1
0
1
0
Enable
Status
t
1
0
EndOfProfile
t
1
0
I5:
I6:
I7:
C3_INPUT
I1:
I2:
I3:
I0:
I4:
Enable : BOOL
StartMode : INT
Status : BOOL
Error : BOOL
C3_MasterControl
Busy : BOOL
StartSource : DWORD
StartMask : WORD
StopMode : INT
Periodic : BOOL
Master : INT
EndOfProfile : BOOL
BackStop : BOOL
Slave: INT
ADR (C3.DigitalInput_Value)
AXIS_REF_Physical
2
2
1
FALSE
TRUE
AXIS_REF_LocalAxis
t
1
0
Busy
360°
Example 1:

 Loading...
Loading...







