Parker EME
Compax3 - Objects
192-121102 N04 June 2008 419
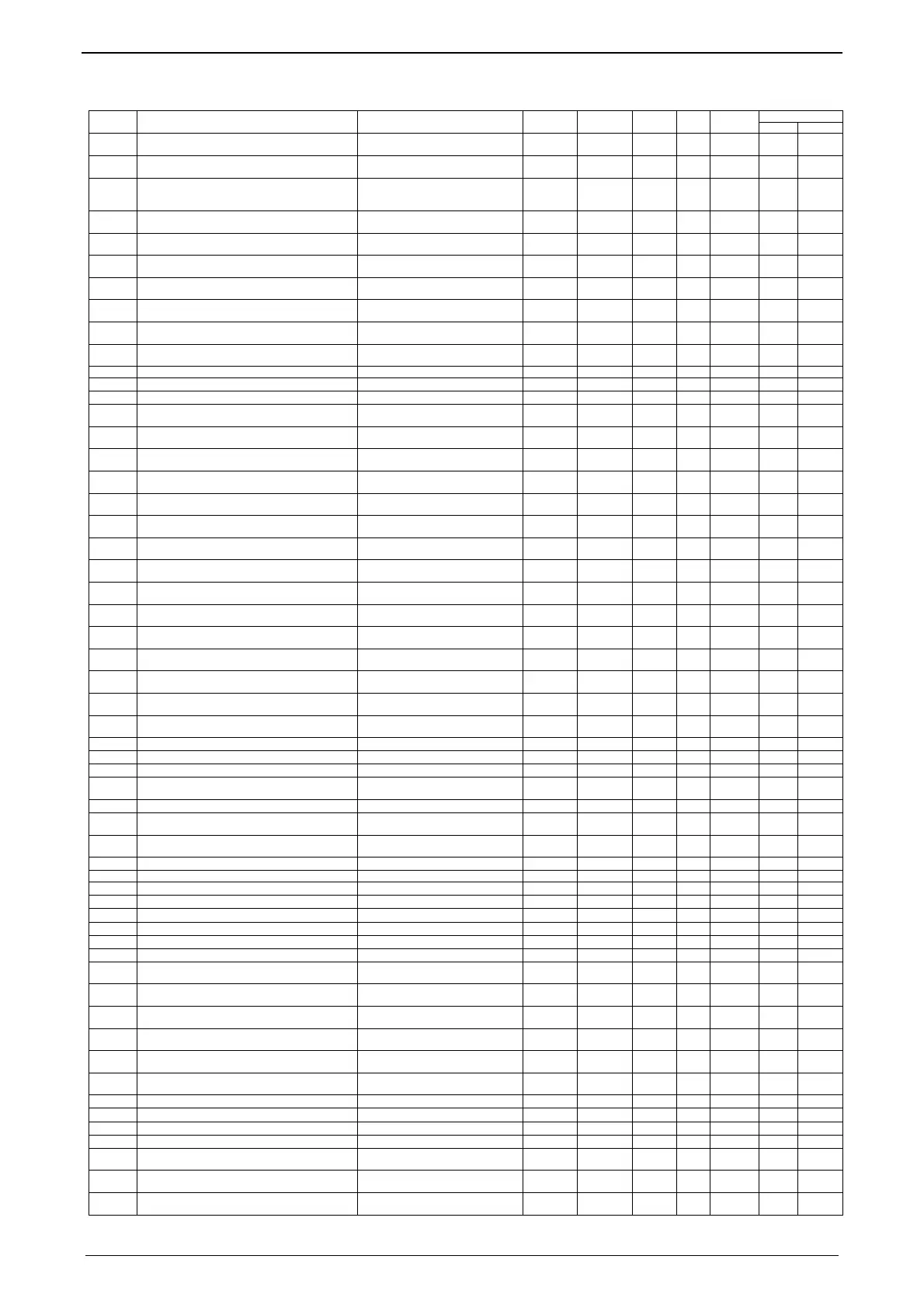
Bus object No. Object name Object PNU CAN No. Format PD Valid
beginning
I20 I21 / I22
201.6 C3.NormFactorY4_DemandValue2 Normalization factor for 1100.7 356.6 0x2021.6 V2 no Immediat
ely
X X
201.12 C3.NormFactorY4_DemandValue8 Normalization factor for 1100.13 356.12 0x2021.12 V2 no Immediat
ely
X X
201.11 C3.NormFactorY4_FBI_SignalProcessing Normalization factor for bus
interpolation
CANSync/EthernetPowerLink
356.11 0x2021.11 V2 no Immediat
ely
- X
201.1 C3.NormFactorY4_Speed Scaling factor for Y4 speeds 356.1 0x2021.1 V2 no Immediat
ely
X X
201.3 C3.NormFactorY4_Voltage Scaling factor for Y4 voltages 356.3 0x2021.3 V2 no Immediat
ely
X X
20.1 C3.ObjectDir_Objekts-->FLASH Store objects permanently (bus) 339 0x2017 I16 no Immediat
ely
X X
20.10 C3.ObjectDir_ReadObjects Read objects from Flash
I16 no Immediat
ely
- -
20.11 C3.ObjectDir_WriteObjects Save objects permanently
I16 no Immediat
ely
- -
2260.8 C3.PositionController_2_TrackingErrorFilter_us Following error filter of auxiliary axis
U16 no Immediat
ely
- -
420.3 C3.PositioningAccuracy_FollowingErrorTimeout Following Error Time 331 0x6066 U16 no Immediat
ely
- -
420.2 C3.PositioningAccuracy_FollowingErrorWindow Following error limit 330 0x6065 C4_3 no VP - -
420.6 C3.PositioningAccuracy_PositionReached Position reached
I32 no - - -
420.8 C3.PositioningAccuracy_PositionReached_2 Position reached (auxiliary axis)
I32 no - - -
420.1 C3.PositioningAccuracy_Window Positioning window for position
reached
328 0x6067 C4_3 no VP - -
420.7 C3.PositioningAccuracy_WindowTime In Position Window Time 329 0x6068 U16 no Immediat
ely
- -
165.1 C3.PressureArray_Index0 Analog Input X1:IN0 measured
pressure in mbar
I16 no Immediat
ely
- -
165.2 C3.PressureArray_Index1 Analog Input X1:IN1 measured
pressure in mbar
I16 no Immediat
ely
- -
165.11 C3.PressureArray_Index10 Reference pressure 10
I16 no Immediat
ely
- -
165.12 C3.PressureArray_Index11 Reference pressure 11
I16 no Immediat
ely
- -
165.13 C3.PressureArray_Index12 Reference pressure 12
I16 no Immediat
ely
- -
165.3 C3.PressureArray_Index2 Analog Input X1:IN2 measured
pressure in mbar
I16 no Immediat
ely
- -
165.4 C3.PressureArray_Index3 Analog Input X1:IN3 measured
pressure in mbar
I16 no Immediat
ely
- -
165.5 C3.PressureArray_Index4 Analog Input X1:IN4 measured
pressure in mbar
I16 no Immediat
ely
- -
165.6 C3.PressureArray_Index5 Analog Input X1:IN5 measured
pressure in mbar
I16 no Immediat
ely
- -
165.7 C3.PressureArray_Index6 Reference pressure 6
I16 no Immediat
ely
- -
165.8 C3.PressureArray_Index7 Reference pressure 7
I16 no Immediat
ely
- -
165.9 C3.PressureArray_Index8 Reference pressure 8
I16 no Immediat
ely
- -
165.10 C3.PressureArray_Index9 Reference pressure 9
I16 no Immediat
ely
- -
2250.22 C3.PressureController_1_ActuatingSignalFilter Control signal filter of force
I32 no VP - -
2250.8 C3.PressureController_1_TimeDelay_DT1_T1 Delay time constant T1
U32 no VP - -
2251.22 C3.PressureController_2_ActuatingSignalFilter Control signal filter of force (A2)
I32 no VP - -
2251.8 C3.PressureController_2_TimeDelay_DT1_T1 PID force controller 2 delay time
constant of the D-term T1
U32 no VP - -
2210.8 C3.SpeedController_ActuatingSignal_filt Control signal filter of position
U16 no VP - -
2270.8 C3.SpeedController2_ActuatingSignal_filt Control signal filter of position
auxiliary axis
U16 no VP - -
682.5 C3.StatusAccel_Actual Status of actual acceleration
unfiltered
I32 no - - -
682.6 C3.StatusAccel_ActualFilter Status of filtered actual acceleration
I32 no - - -
682.4 C3.StatusAccel_DemandValue Status demand acceleration 325 0x200E I32 no - - -
682.7 C3.StatusAccel_FeedForwardAccel Status acceleration feed forward
C4_3 no - - -
692.4 C3.StatusFeedback_EncoderCosine Status of analog input cosine
I32 no - - -
692.3 C3.StatusFeedback_EncoderSine Status of analog input sine
I32 no - - -
692.2 C3.StatusFeedback_FeedbackCosineDSP Status of cosine in signal processing
I32 yes - - -
692.1 C3.StatusFeedback_FeedbackSineDSP Status of sine in signal processing
I32 yes - - -
692.5 C3.StatusFeedback_FeedbackVoltage[Vpp] Status of feedback level
C4_3 no - - -
695.11 C3.StatusForce_Actual Actual value force controller main
axis [N]
221
I32 yes - - -
695.14 C3.StatusForce_Actual2 Actual value force controller auxiliary
axis [N]
222
I32 yes - - -
695.10 C3.StatusForce_Demand Setpoint value force controller main
axis [N]
I32 no - - -
695.13 C3.StatusForce_Demand2 Setpoint value force controller
auxiliary axis [N]
I32 no - - -
695.12 C3.StatusForce_Error Control deviation force controller
main axis [N]
I32 no - - -
695.15 C3.StatusForce_Error2 Control deviation force controller
auxiliary axis [N]
I32 no - - -
695.1 C3.StatusForce_Force1 Force of force sensor main axis
I32 no - - -
695.2 C3.StatusForce_Force2 Force of force sensor of auxiliary axis
I32 no - - -
689.1 C3.StatusHeda_RxPD Receive string
OS no - - -
689.2 C3.StatusHeda_TxPD Transmit string
OS no - - -
697.4 C3.StatusPosController_ActuatingSignal_AddAcce
l_YA
Acceleration feedback (A1)
C4_3 no - - -
697.14 C3.StatusPosController_ActuatingSignal_AddAcce
l_YA2
Acceleration feedback (A2)
C4_3 no - - -
697.3 C3.StatusPosController_ActuatingSignal_AddSpee
d_YV
Speed feedback (A1)
C4_3 no - - -

 Loading...
Loading...







