January 2012 6.16 The Control Loop 941
6.16.26 TRC – Torque Ripple Compensation
General
Information
Certain motors with permanent magnets (linear, torque and some
synchronous motors) have an increased, position-dependent variation of the
motor torque (not QSY motors from HEIDENHAIN). This can be the result of
two things:
During idle running, the cogging due to attractive forces of the permanent
magnets
When under load, the torque ripple from higher harmonics, resulting from
the opposing electromotive forces (generator effect)
In practice, both causes always occur together, i.e. the torque of the motor is
subject to periodic oscillations. This can have a negative effect on the
controllability of the motor, which can result in a greater following error, and
under circumstances, lower surface quality of the workpiece.
To compensate for the cogging, a compensation current ascertained
specifically for each motor can now be added.
This function is only available when using the CC 61xx, UEC 11x or CC 424
controller unit!
Settings in the configuration editor MP number
Axes
ParameterSets
[Key name of the parameter set]
CfgControllerComp
compTorqueRipple
compSwitchOff
401412
401414
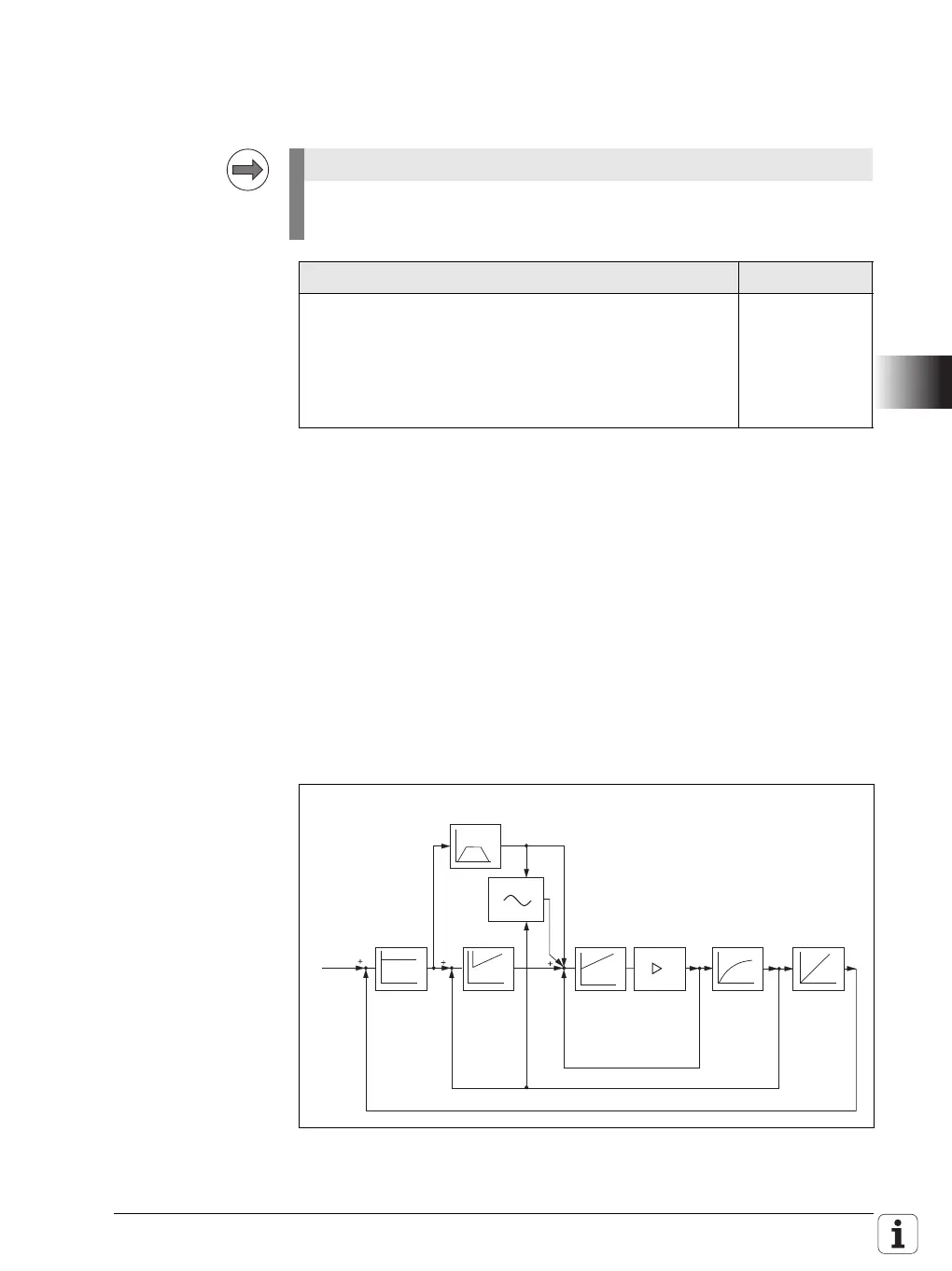
TRC
Power stage
Speed control
Position
controller
Acceleration
feedforward
Nominal
position
Current
controller
Actual current
Actual position
Actual speed
Motor
Machine
slide

 Loading...
Loading...





