730 HEIDENHAIN Technical Manual MANUALplus 620
6.11.1 Configuring the machine kinematics
Specify the machine kinematics as well as the resulting transformation model,
starting from the machine reference point (REF 0).
Set the axes to the machine datum
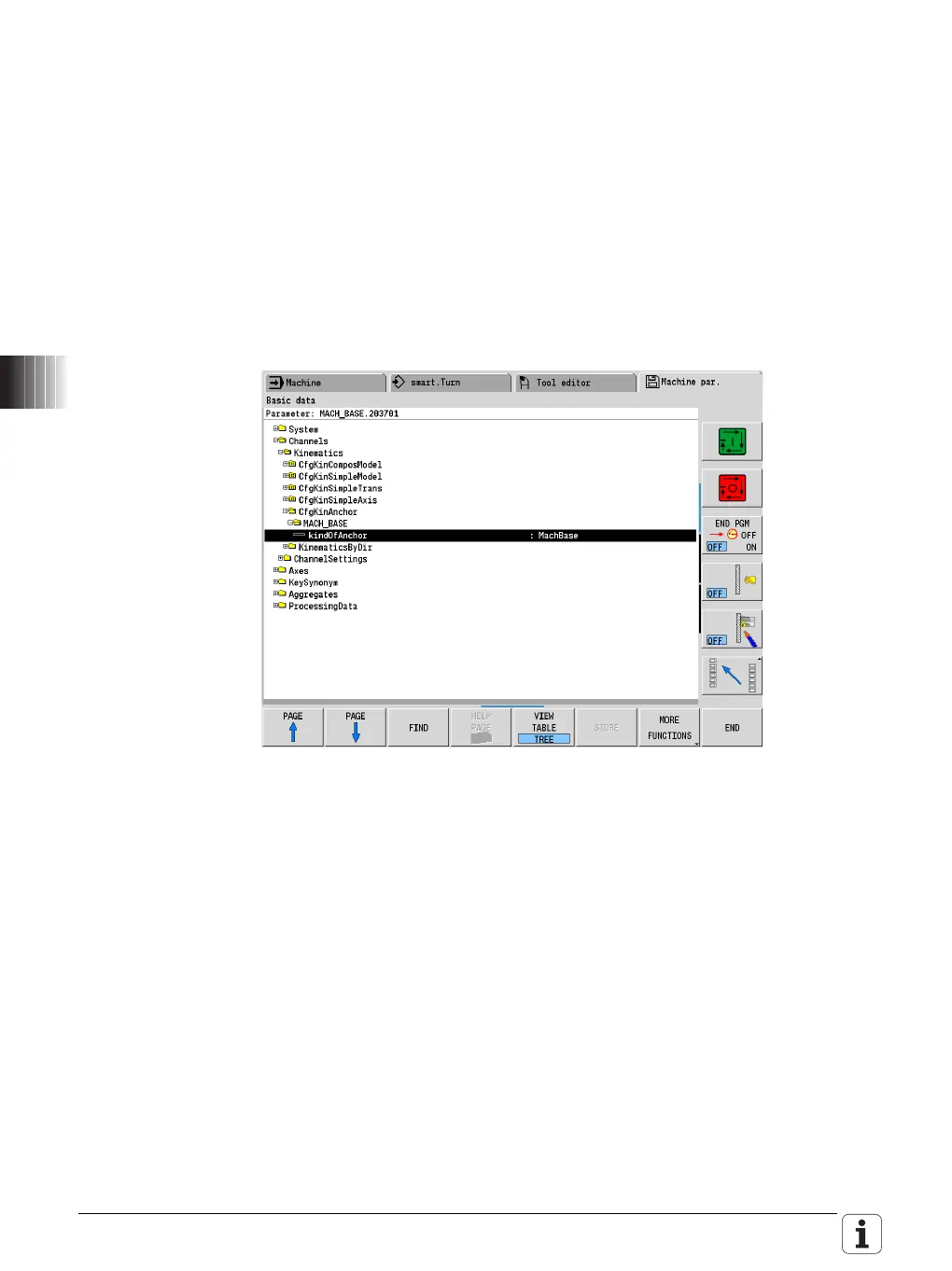
Basic procedure: Work your way "from the bottom up" through the folders of
the kinematic configuration (System/Channels/Kinematics).
Configure a machine base
Define the fixed points in the kinematics chain with the CfgKinAnchor
configuration object. A machine base is such a fixed point.
Create a key name (= folder) for the machine base under CfgKinAnchor,
e.g. Base. Select the value MachBase for the parameter MP_kindOfAnchor.
You will need the machine base later for the configuration of subkinematics.

 Loading...
Loading...





