Page 44 Transport/Start up Group 5
Release R1.12 en JET2 neo
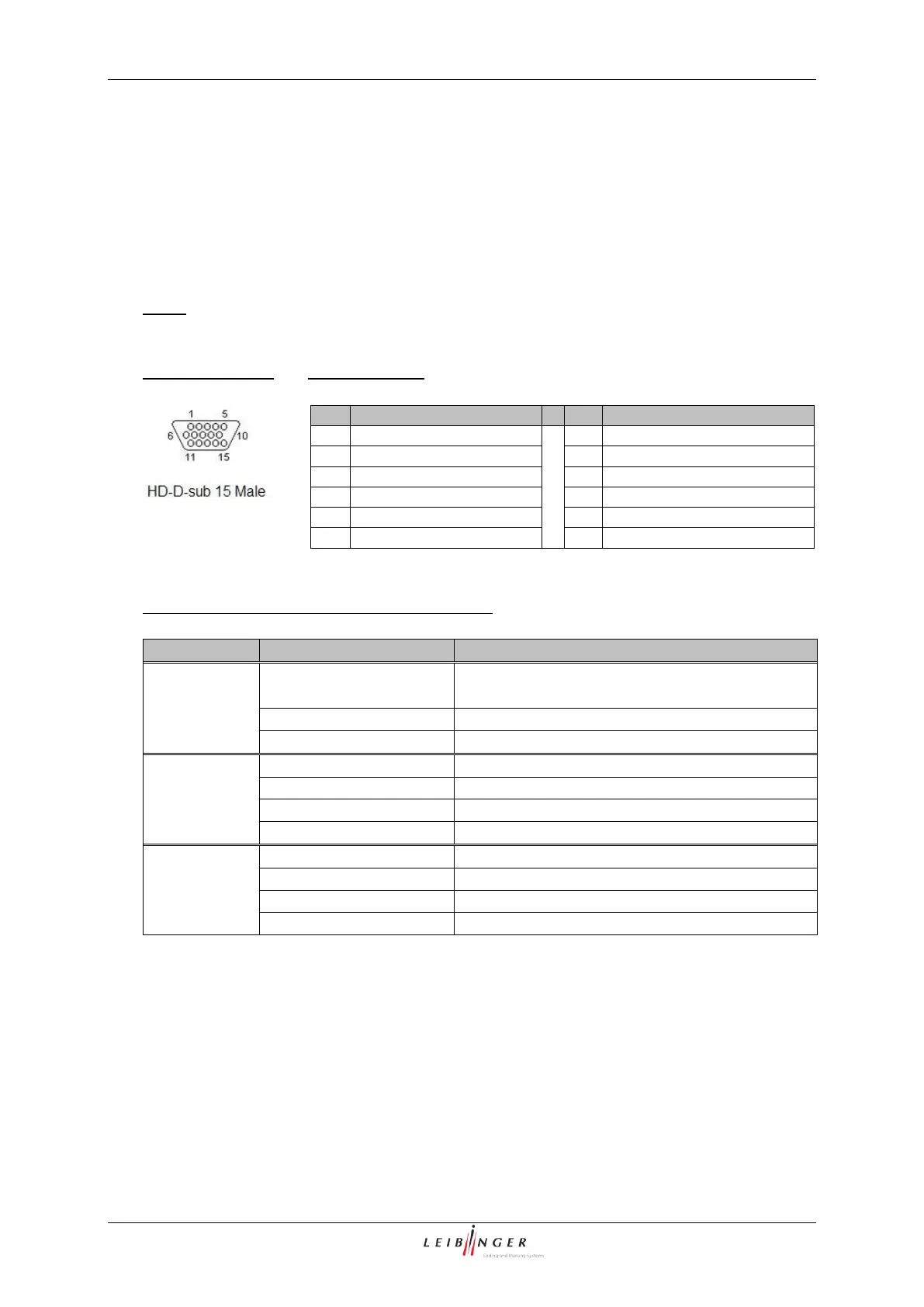
5.5.1 Interface X1 (Encoder)
5.5.1.1 Description and configuration
The interface “X1” provides the connection of a shaft encoder.
Due to the input for which you can set the software individually, the encoders can be
connected according to different norms without an additional converter.
Note: For variable product speed you have to use a shaft encoder to synchronize the
printing speed or to control the constant font width.
Basic data/Recommended working conditions:
Difference input +/-200mV
Input voltage range: -0.3 up to 5.5V
(1)
All 24V inputs which are designated with (1) are protected by a self-reset fuse with 700 mA.