Controller area network (bxCAN) RM0351
1592/1830 DocID024597 Rev 5
A valid edge is defined as the first transition in a bit time from dominant to recessive bus
level provided the controller itself does not send a recessive bit.
If a valid edge is detected in BS1 instead of SYNC_SEG, BS1 is extended by up to SJW so
that the sample point is delayed.
Conversely, if a valid edge is detected in BS2 instead of SYNC_SEG, BS2 is shortened by
up to SJW so that the transmit point is moved earlier.
As a safeguard against programming errors, the configuration of the Bit Timing Register
(CAN_BTR) is only possible while the device is in Standby mode.
Note: For a detailed description of the CAN bit timing and resynchronization mechanism, refer to
the ISO 11898 standard.
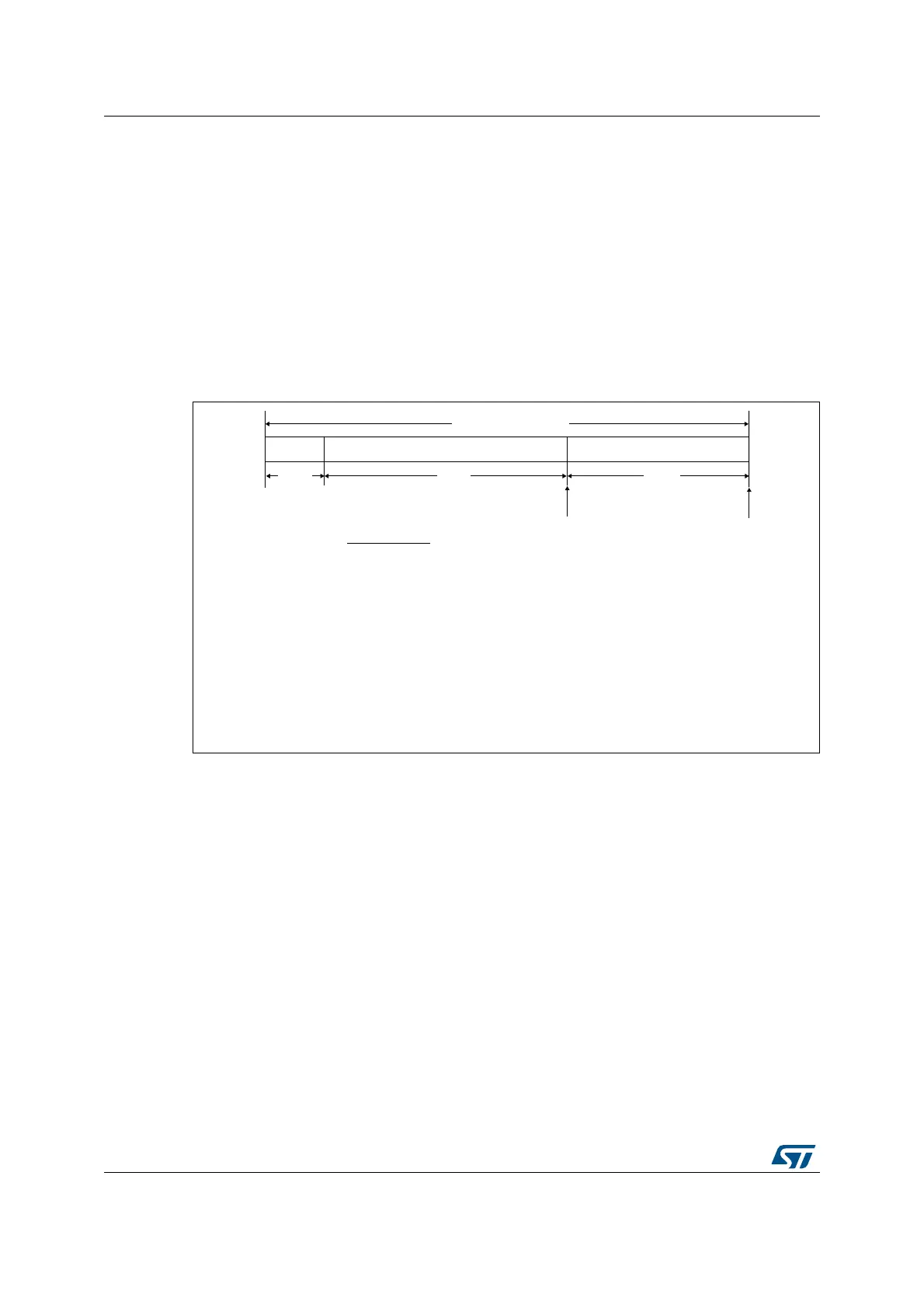
Figure 513. Bit timing
6<1&B6(*
%,76(*0(17%6
120,1$/%,77,0(
[W
T
W
%6
6$03/(32,17 75$160,732,17
1RPLQDO%LW7LPH [WTW%6W%6
ZLWK
W
%6 WT[76>@
W
T %53>@[W3&/.
ZKHUHWTUHIHUVWRWKHWLPHTXDQWXP
W
3&/. WLPHSHULRGRIWKH$3%FORFN
%DXG5DWH
1RPLQDO%LW7LPH
069
%,76(*0(17%6
W%6
W%6 WT[76>@
%53>@76>@76>@DUHGHILQHGLQWKH&$1B%75UHJLVWHU
 Loading...
Loading...