10. CHARACTERISTICS
10 - 2
10. CHARACTERISTICS
10.1 Overload protection characteristics
An electronic thermal is built in the driver to protect the servo motor, driver and servo motor power wires
from overloads.
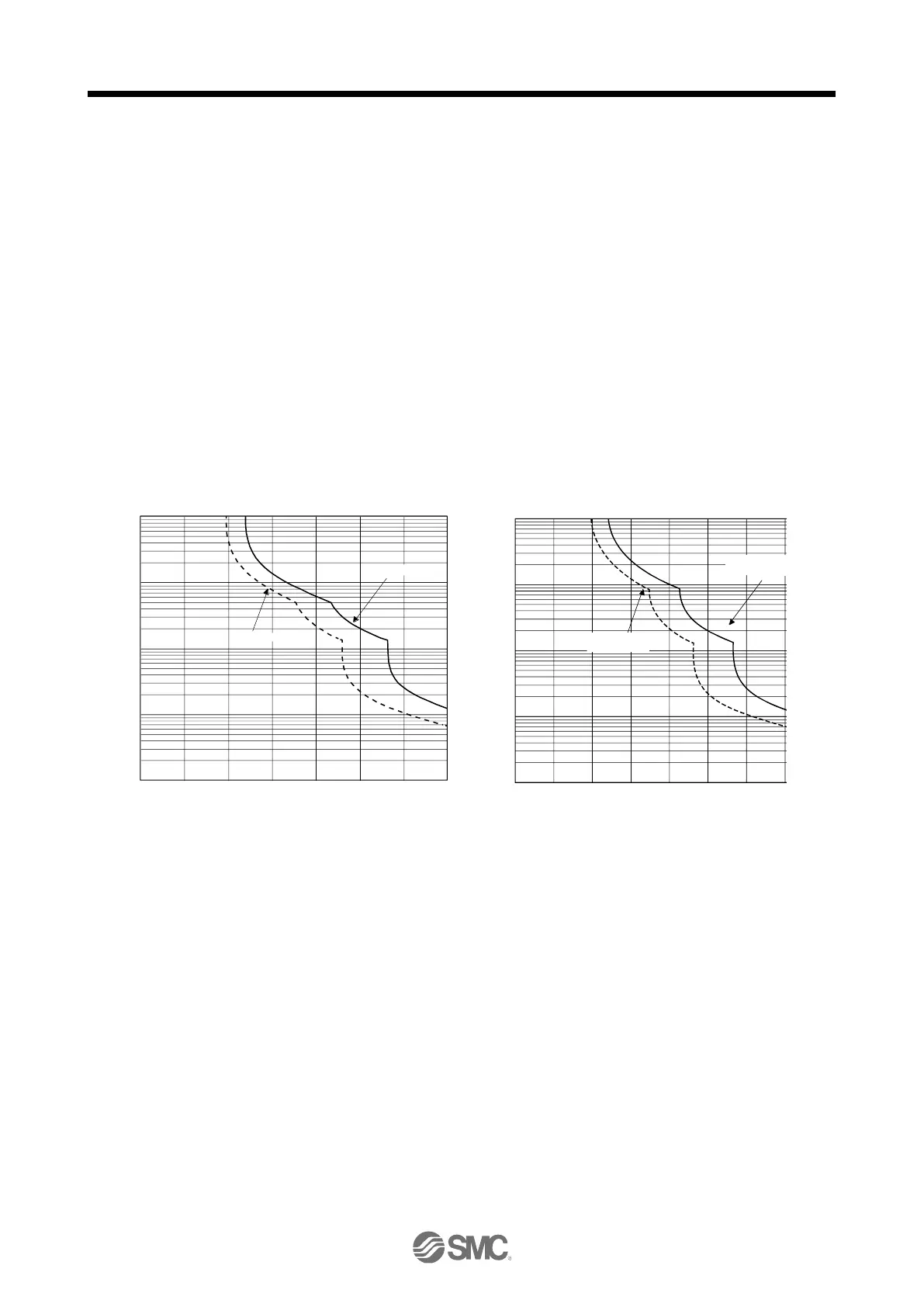
[AL. 50 Overload 1] occurs if overload operation performed is above the electronic thermal protection curve
shown in fig. 10.1 [AL. 51 Overload 2] occurs if the maximum current is applied continuously for several
seconds due to machine collision, etc. Use the equipment on the left-hand side area of the continuous or
broken line in the graph.
For the system where the unbalanced torque occurs, such as a vertical axis system, the unbalanced torque
of the machine should be kept at 70% or less of the rated torque.
This driver has solid-state servo motor overload protection. (The servo motor overload current (full load
current) is set on the basis of 120% rated current of the driver.)
The following table shows combinations of each servo motor and graph of overload protection
characteristics.
The following graphs show overload protection characteristics.
If operation that generates torque more than 100% of the rating is performed with an abnormally high frequency in a servo
motor stop status (servo-lock status) or in a 50 r/min or less low-speed operation status, the driver may malfunction
regardless of the electronic thermal protection.

 Loading...
Loading...







