APPENDIX
App. - 22
App .9 Recommended parameter values for each actuator
Please change the parameter values according to the customer application. See section 5 of the
“LECSN2-T□ Operation Manual” for details.
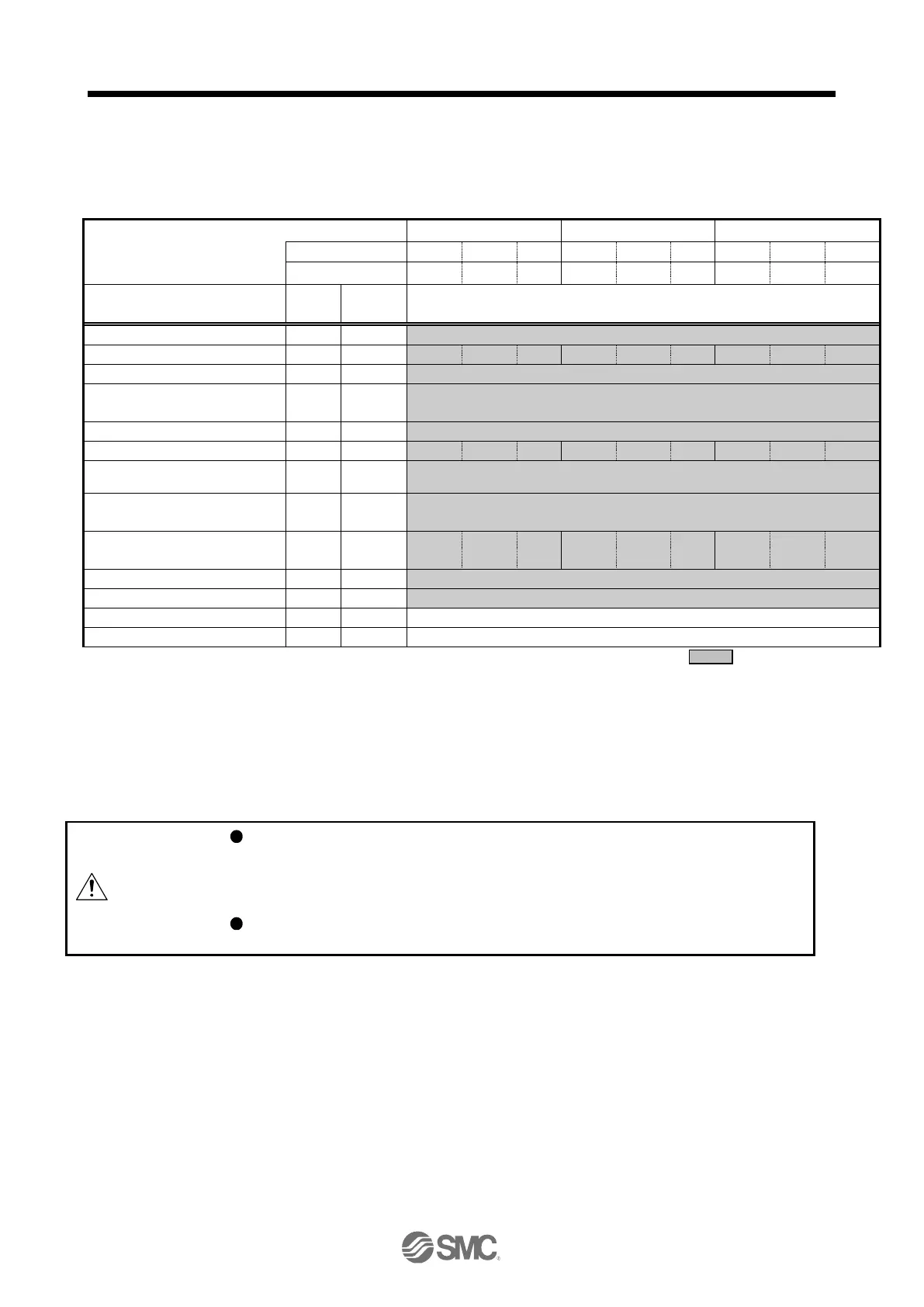
Recommended Parameter Values [LEF]
Electronic gear numerator *3.
Electronic gear denominator *3.
Command mode selection *3
Feel length multiplication (STM)
(Multiplier)
0000 ((<1000 stroke)/0001 (>1000 stroke)
Home position return method
-36 (Home position return direction: Motor side, Stopper type)
Home position return Speed (rpm)
Stopper type home position return
stopper time (msec)
Stopper type home position return
torque limit value (%)
Home position return acceleration
time constant (msec)
0000 (Non)/0002 (LEC-MR-RB-032)
Rotation direction selection *4
1 (+:Counter motors side)
Load to motor inertia moment ratio
*1. Parameter is set to the recommended value. Please set parameter according to customer application.
*2. Mechanical resonance may occur depending on the shape or mounting orientation of the work piece.
Please change this parameter during initial configuration.
(Parameter initial configuration ⇒ Set the recommended parameter value ⇒ Operation start)
*3. Minimum actuator travel distance of 1[μm].
*4. When the motor mounting position is right side parallel (LEFS*R) or left side parallel (LEFS*L), the
rotation direction selection is 0(+: Counter motors side).
When the stopper type home position return is used and the actuator end is set to
the home position, please pay attention to the actuator movable range when
commanding the position to prevent collision with both ends of the actuator due to
overshoot.
When the origin (0 mm) is set at the actuator end, the movable range of this
actuator is from [+2mm] to [actuator stroke +2mm].

 Loading...
Loading...







