4. STARTUP
4 - 17
4.5.2 Motor-less operation in upper side
Connect the upper side to the driver before the motor-less operation.
(1) Motor-less operation
Without connecting the servo motor to the driver, output signals or status displays can be provided in
response to the upper side commands as if the servo motor is actually running. This operation may be
used to check the upper side sequence. Use this operation with the forced stop reset. Use this operation
with the driver connected to the upper side.
To stop the motor-less operation, set "Disabled (_ _ _ 0)" of "Motor-less operation selection" in [Pr.
PC05]. The motor-less operation will be disabled from the next power-on.
(a) Load conditions
Load to motor inertia ratio
[Pr. PB06 Load to motor inertia ratio/load to motor mass
ratio]
(b) Alarms
The following alarms and warning do not occur. However, the other alarms and warnings occur as
when the servo motor is connected.
[AL. 16 Encoder initial communication error 1]
[AL. 1E Encoder initial communication error 2]
[AL. 1F Encoder initial communication error 3]
[AL. 20 Encoder normal communication error 1]
[AL. 21 Encoder normal communication error 2]
[AL. 25 Absolute position erased]
[AL. 92 Battery cable disconnection warning]
[AL. 9F Battery warning]
(2) Operation procedure
1) Set the driver to the servo-off status.
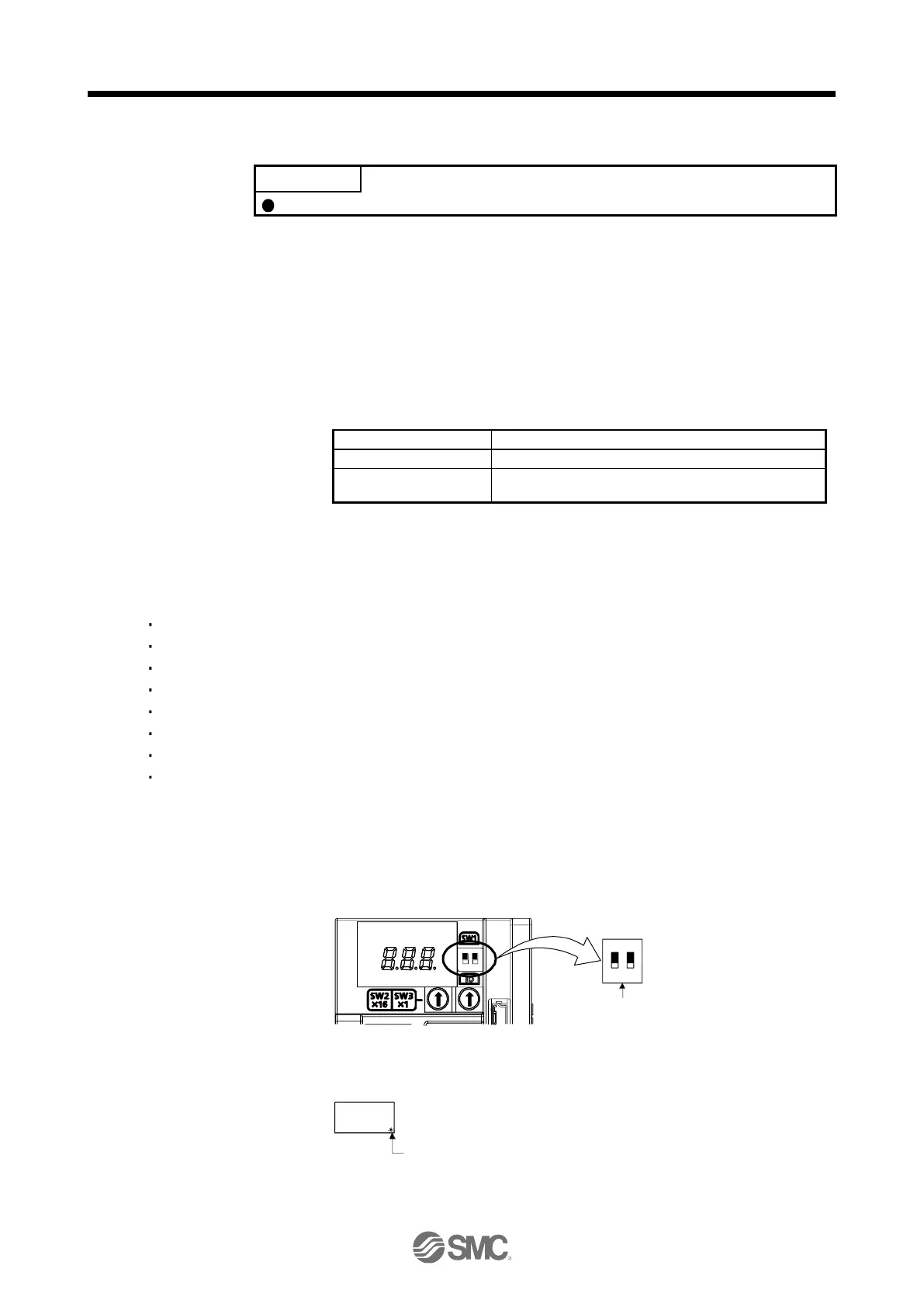
2) Set [Pr. PC05] to "_ _ _ 1", turn "OFF (down)" the test operation mode switch (SW1-1), and then
turn on the power supply.
1
ON
2
Set SW1-1 to "OFF (down)".
1
ON
2
3) Start the motor-less operation with the upper side.
The display shows the following screen.
The decimal point blinks.

 Loading...
Loading...







