16. HOW TO USE THE POINT TABLE
16.4 Jog mode (jg)
For the machine adjustment, home position adjustment, and others, positioning to any point is possible with
the JOG mode (jg).
(1) Setting
According to the purpose of use, set objects and parameters as shown below. In this case, "Target point
table" is disabled.
Object/parameter to be used
Servo motor rotation direction
Refer to (2) in this section.
Set the servo motor speed.
Acceleration time constant
Set the acceleration time constant.
Deceleration time constant
Set the deceleration time constant.
Set a speed limit value for during operation.
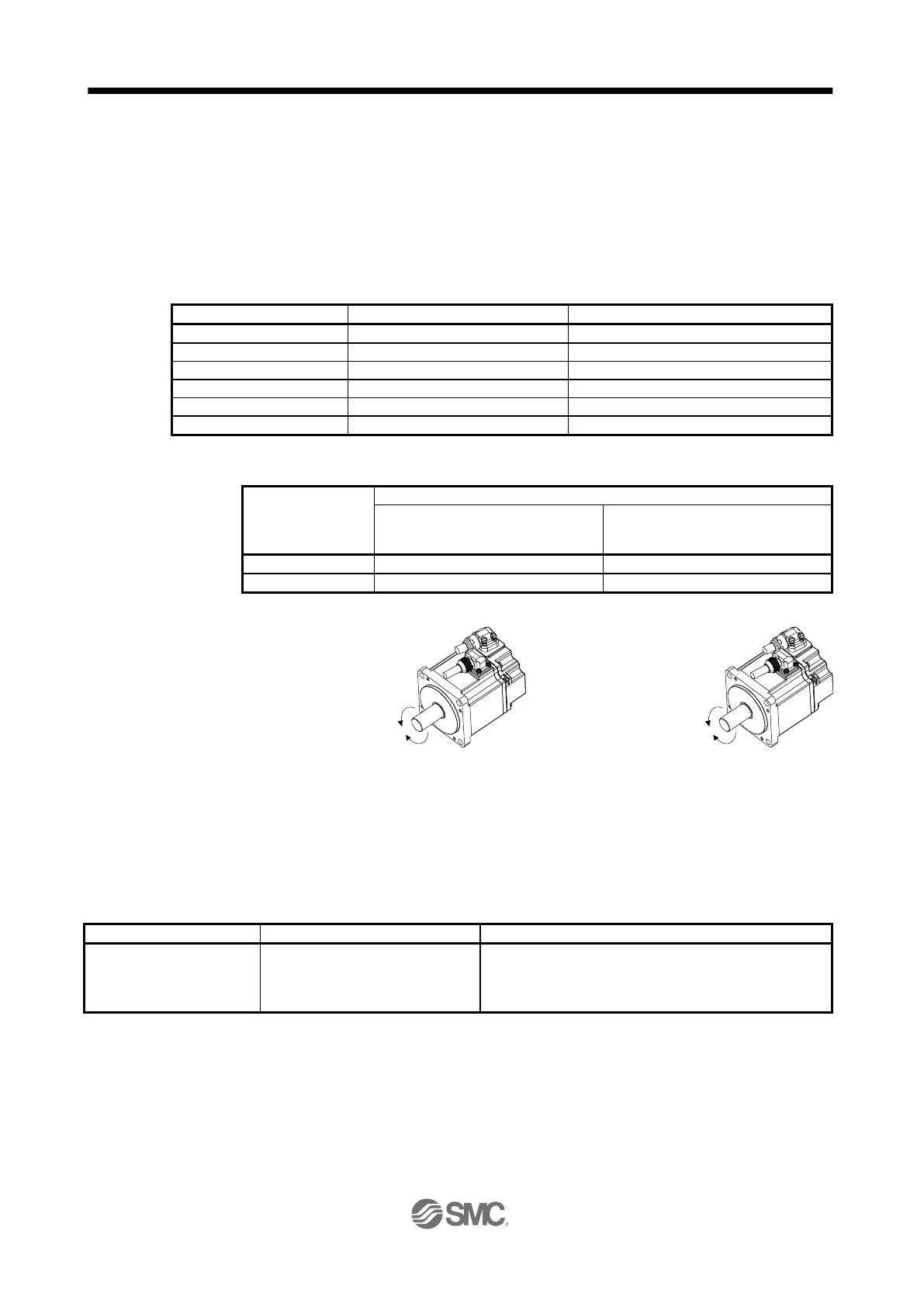
(2) Servo motor rotation direction
Servo motor rotation direction
Forward rotation start
(Controlword bit 4 (Rotation start): on
Controlword bit 5 (Direction): off)
Reverse rotation start
(Controlword bit 4 (Rotation start): on
Controlword bit 5 (Direction): on)
(3) Operation
Switching on "Controlword bit 4 (Rotation start)" starts at the set speed, acceleration time constant and
deceleration time constant. Switching off "Controlword bit 4 (Rotation start)" makes s deceleration to a
stop. Refer to (2) in this section for rotation direction.
Set start/stop in "Controlword bit 4 (Rotation start)". The
setting is shown as follows:
On: start
Off: deceleration to a stop
[Pr. PA14]: 0 [Pr. PA14]: 1
CW
Reverse rotation start
CW
Forward rotation start
Reverse rotation start
CCWCCW
Forward rotation start
CCW
 Loading...
Loading...








