18.EtherCAT COMMUNICATION
18.5.4.6 Profile position mode (pp)
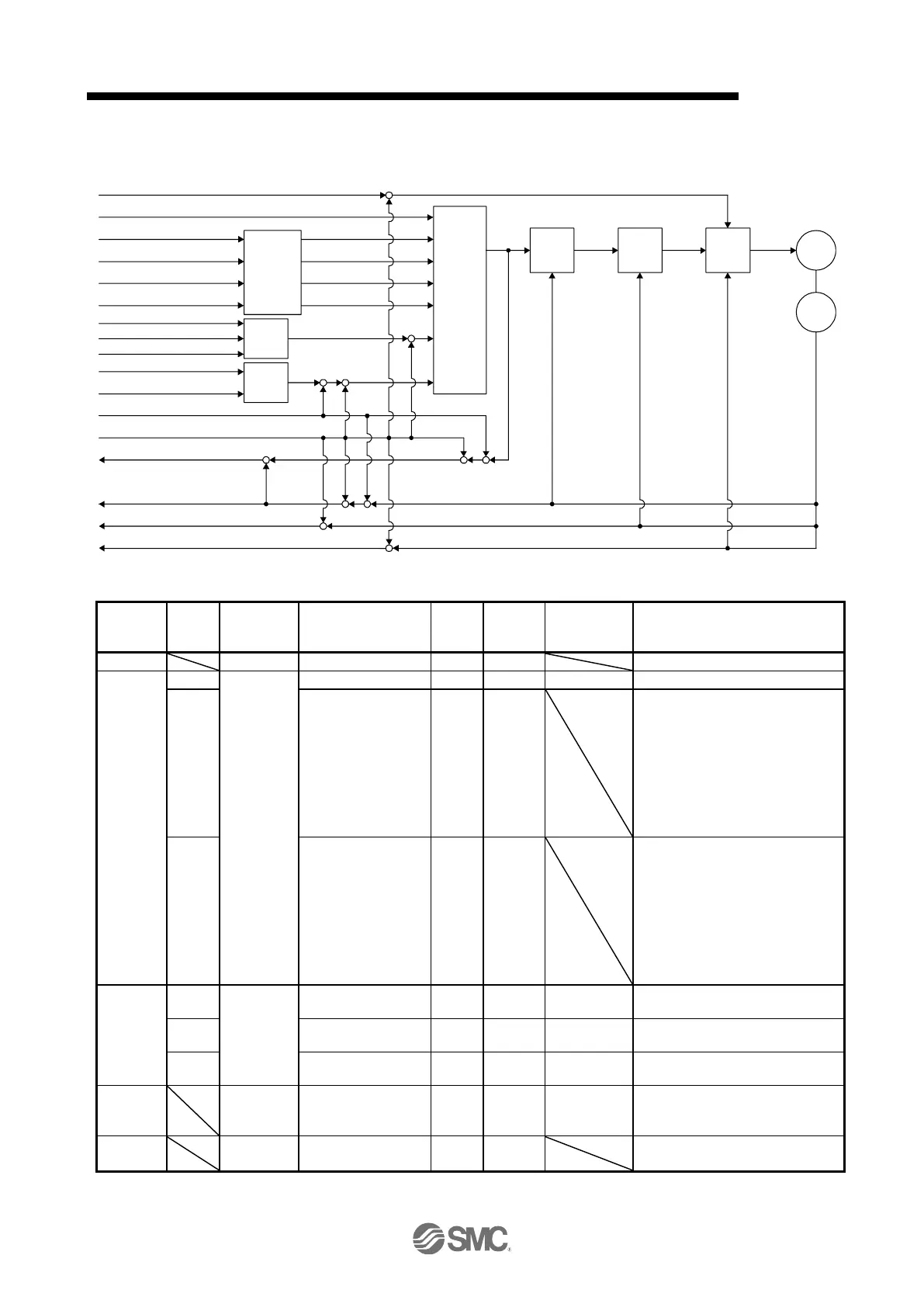
The following shows the functions and related objects of the profile position mode (pp).
Position
trajectry
generator
+
×
×
×
×
×
×
×
-
Control
effort
(60FAh)
Position actual internal value (6063h)×
×
×
Position
limit
function
Velocity
limit
function
Acceleration
limit
function
Position
control
Velocity
control
Torque
control
Encoder
Motor
Torque limit value (60E0h, 60E1h)
Motion profile type (6086h)
Profile acceleration (6083h)
Profile deceleration (6084h)
Quick stop deceleration (6085h)
Quick stop option code (605Ah)
Profile velocity (6081h)
Max motor speed (6080h)
Target position (607Ah)
Software position limit (607Dh)
Gear ratio (6091h)
Polarity (607Eh)
Following error actual value (60F4h)
Position actual value (6064h)
Velocity actual value (606Ch)
Torque actual value (6077h)
Max profile velocity (607Fh)
Command position (Pos units)
Minimum value of the position
range limit
The value is automatically set
according to the setting of
"Position data unit" in [Pr. PT01].
mm/inch/pulse: -2147483648
degree: 0
The cyclic synchronous mode
supports pulses only.
Maximum value of the position
range limit
The value is automatically set
according to the setting of
"Position data unit" in [Pr. PT01].
mm/inch/pulse: 2147483647
degree: 359999
The cyclic synchronous mode
supports pulses only.
Minimum position address (Pos
units)
Maximum position address (Pos
units)
maximum speed
Unit: Vel unit (0.01 r/min or 0.01
mm/s)
Servo motor maximum speed
Unit: r/min

 Loading...
Loading...







