19.EtherNet/IP COMMUNICATION
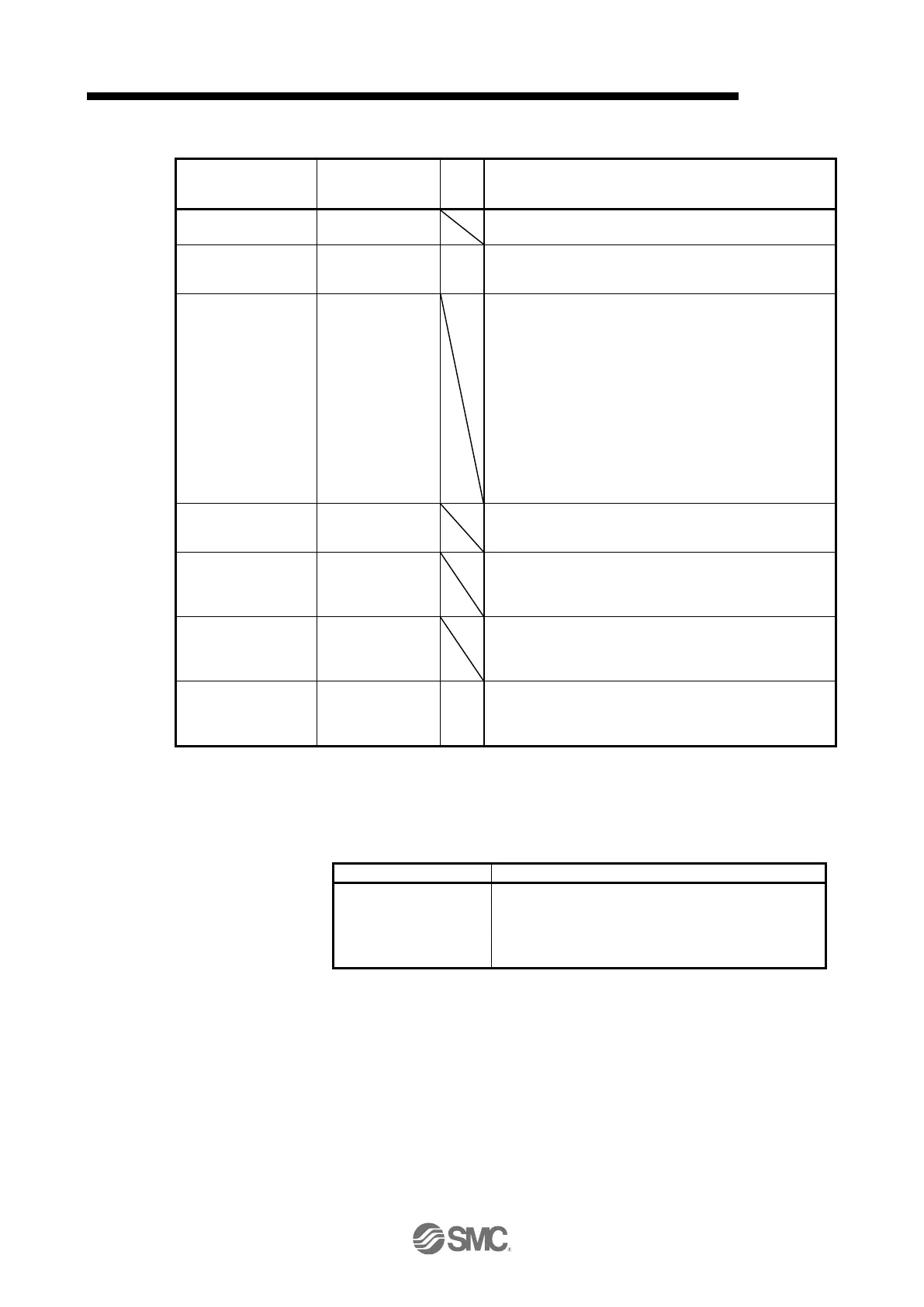
(2) List of items set in the network communication
Object
(Class ID, Ins ID,
Attr ID)
Modes of operation
(64h, 6060h, 0)
Set "1" in Modes of operation to change the control mode to
the profile position mode.
Controlword
(64h, 6040h, 0)
Set the positioning mode. The positioning mode is
determined by a combination of values of bit 5 and bit 9 of
Controlword. Refer to section 5.4.3 for details.
Target position
(64h, 607Ah, 0)
Set a target position. The command used for the target
position can be changed between the absolute position
command and relative position command using bit 6 of
Controlword.
When the unit is set to degree, relative position commands
are disabled. When the relative position command is
specified and positioning is started, [AL. F4.8] occurs and
positioning cannot be started.
If positioning is attempted with a set target position outside
the following setting range, [AL. F4.4] occurs and the
positioning cannot be started.
pulse: -999999 to 999999
degree: -360000 to 360000
Profile velocity
(64h, 6081h, 0)
Set a target speed. This value is clamped at the speed set
with Max profile velocity (64h, 607Fh, 0) or the instantaneous
permissible speed of the servo motor used.
Acceleration time
constant
Profile acceleration
(64h, 6083h, 0)
Set the acceleration time taken for the servo motor that has
stopped to reach the rated speed. If positioning is attempted
with a time longer than 20000 ms set, [AL. F4.6] occurs and
the positioning cannot be started.
Deceleration time
constant
Profile deceleration
(64h, 6084h, 0)
Set the deceleration time for the servo motor to stop from the
rated speed. If positioning is attempted with a time longer
than 20000 ms set, [AL. F4.7] occurs and the positioning
cannot be started.
Operation start-up
signal activation
(C_OSSA)
Control DI 10
(64h, 2D0Ah, 0)
Turn on Operation start-up signal activation (C_OSSA). If
Operation start-up signal activation (C_OSSA) is turned on
without ST (operation start-up) assigned to an external input
signal, Operation error (S_OERR) turns on.
19.6.9.4 Status obtainable in the network communication
The following table shows the specific status that can be obtained in the network communication during
positioning operation by an operation start-up signal. The status that can be obtained in the profile position
mode can be obtained. Refer to section 5.3 for details.
Indicates that an error has occurred in a positioning
operation started by the operation start-up signal.
The status can be obtained with bit 2 of Status DO 10.
Off: Normal
On: Error

 Loading...
Loading...







