18.EtherCAT COMMUNICATION
18.1.3 Communication specifications
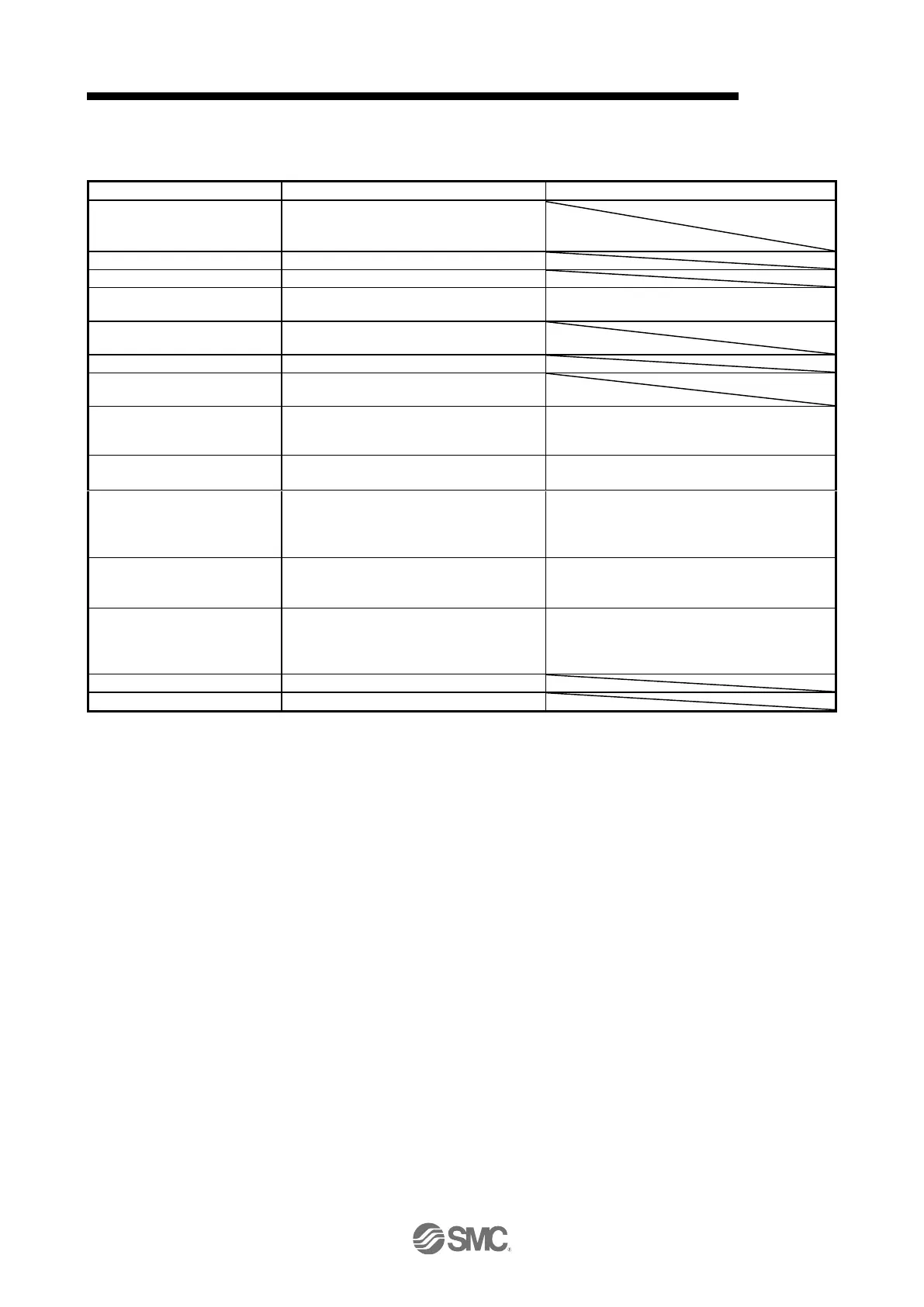
The following table shows the communication specifications.
EtherCAT communication
specifications
IEC 61158 Type121
CAN application protocol over EtherCAT
(CoE), IEC 61800-7 CiA 402 Drive Profile
RJ45, 2 ports (IN port, OUT port)
CAT5e, shielded twisted pair (4 pair) straight
cable
Double-shielded type recommended
Line, Tree, Star, or a connection topology
where the topologies are used together
Variable communication speed
Transmission speed between
stations
The number of connection nodes for actual use
varies depending on the specifications of the
master upper side used.
SDO (Mailbox) communication
Asynchronous
Sending/Receiving: 1 channel each
Maximum data size in sending/receiving
1486 bytes each
PDO (Process Data)
communication
Cycle time: Select from 0.25 ms, 0.5 ms, 1
ms, and 2 ms.
Receive (RxPDO): 1 channel
Send (TxPDO): 1 channel
Data size at PDO default mapping
RxPDO: 29 bytes
TxPDO: 41 bytes
Variable PDO mapping supported
Maximum size of RxPDO and TxPDO: 64 bytes
each
Maximum number of object mapping: 32 each
The DC mode and Free-run mode can be
selected.
(In drivers , the DC mode is required in the
csp, csv, and cst mode.)
Sync0: Set the same cycle as the PDO
communication cycle.
Sync1: Not used
Explicit Device Identification
RUN, ERROR, LINK/Activity (IN, OUT)

 Loading...
Loading...







