7. SPECIAL ADJUSTMENT FUNCTIONS
7 - 35
7.7 Super trace control
(1) Summary
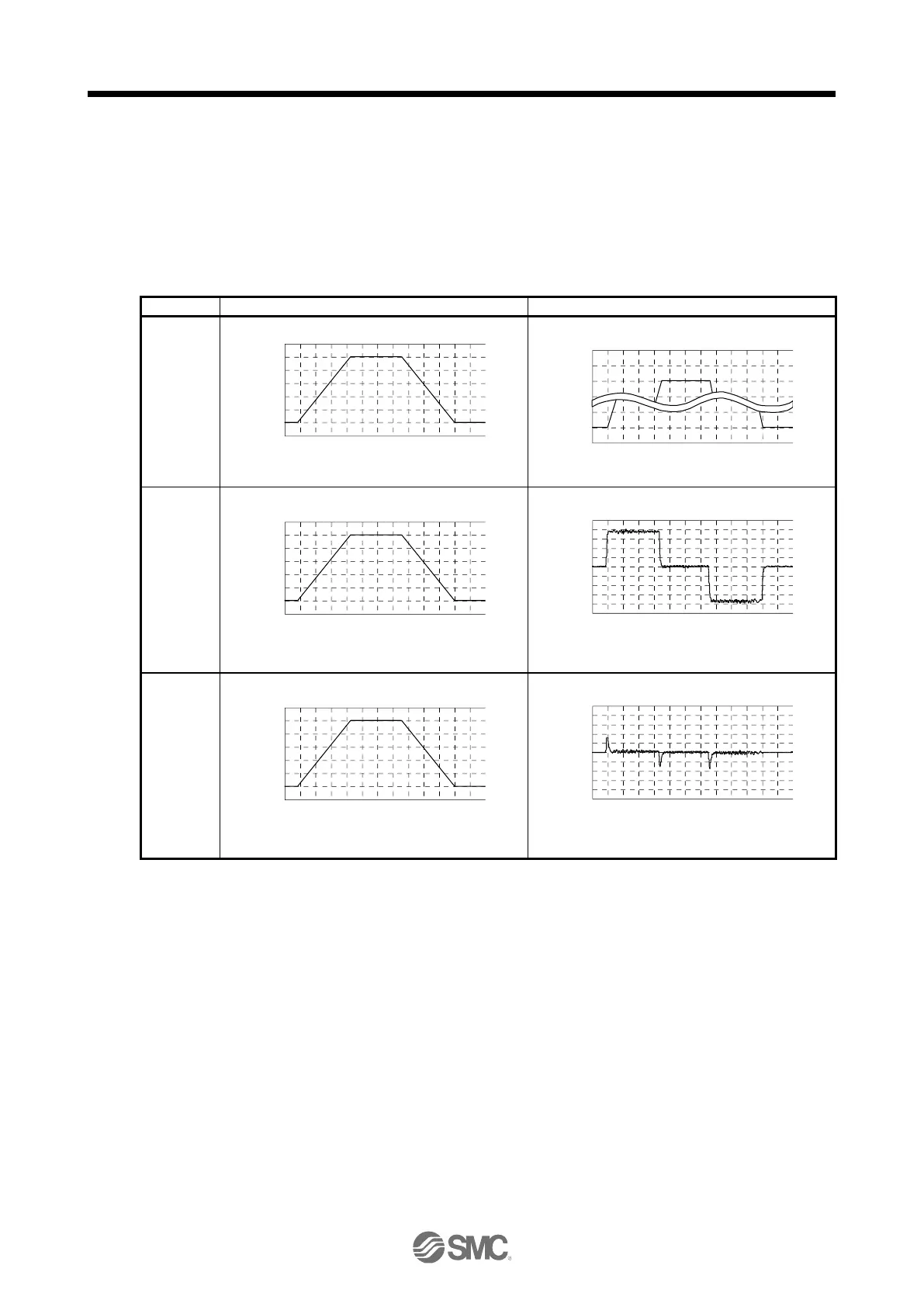
In the normal position control, droop pulses are generated against the position control command from the
PC or PLC...etc. Using the feed forward gain sets droop pulses at a constant speed to almost 0.
However, droop pulses generated during acceleration/deceleration cannot be suppressed.
With the ideal model in the driver, the super trace control enables to set constant speed and uniform
acceleration/deceleration droop pulses to almost 0 that cannot be coped with by the feed forward gain.
 Loading...
Loading...








