18.EtherCAT COMMUNICATION
18.1.4.2 EtherCAT state
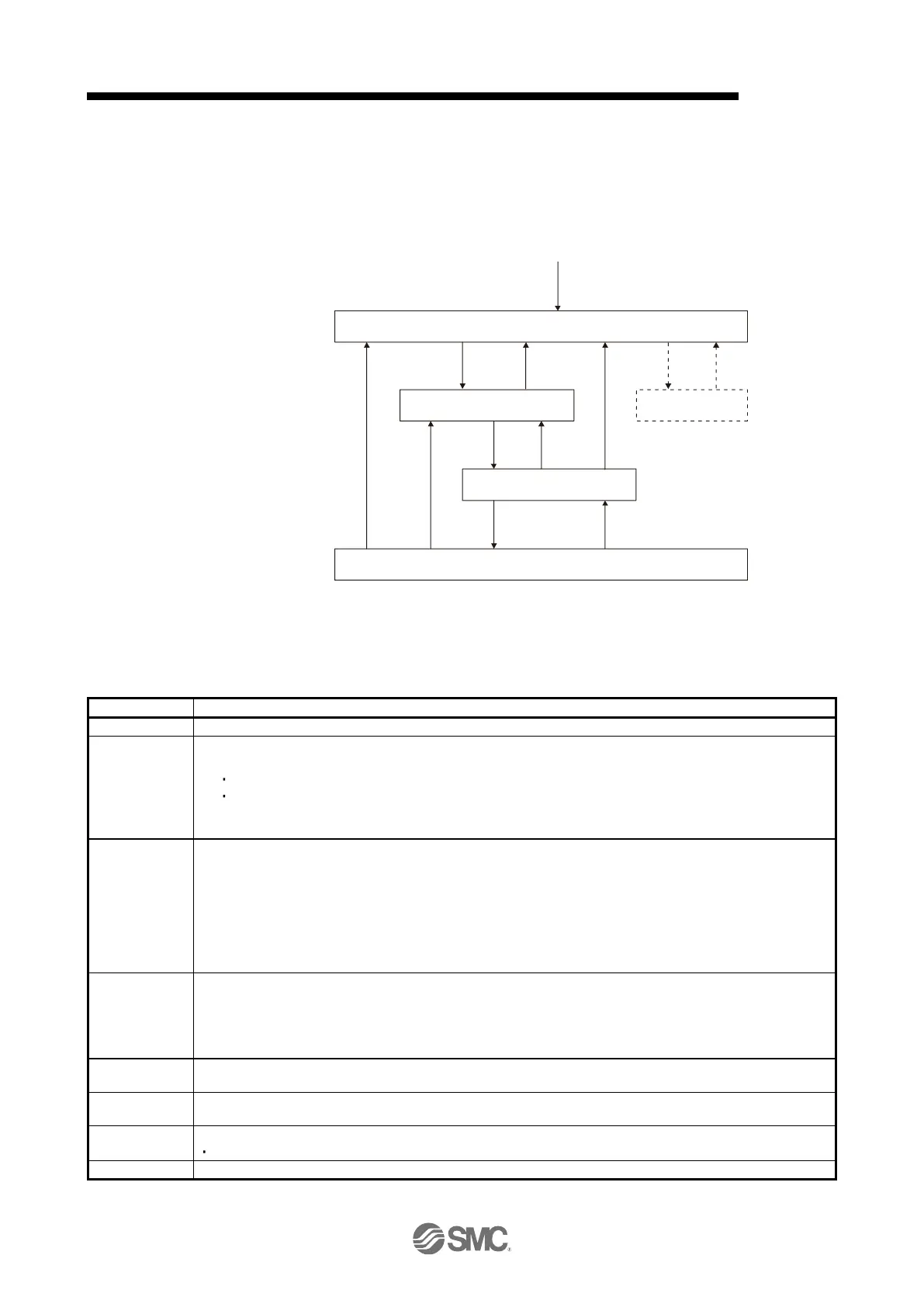
EtherCAT states shift under the conditions shown in figure 1.1 and table 1.1.
When the state shifts from the Init state through the Pre-Operational and Safe-Operational state to the
Operational state, the driver can be operated. When the Operational state shifts to another state, the driver
executes initialization to clear the internal status.
Pow er on
Pre-Operational
Safe-Operational
Bootstrap
Init
Operational
(1)
(3)
(2)
(4)
(5)
(7)
(8)
(6)(9)
(12)
(11)
(Note)
(10)
This state is for manufacturer setting.
Fig. 1.1
Table. 1.1 EtherCAT state transition
SDO communication configuration
(a) The master sets the registers of the slaves. The following shows the registers to be set.
DL Address register
Sync Manager channel for SDO communication
(b) The master requests the slaves to shift to the Pre-Operational state.
(c) The state shifts to the Pre-Operational state.
PDO communication configuration
(a) Set the configuration parameter of the master (such as PDO mapping) using the SDO communication.
(b) The master sets the Sync Manager channel and FMMU channel for the PDO communication of the slaves.
FMMU (Fieldbus Memory Management Unit) is a mechanism to manage the relationship between the global
address area and the local address area in the EtherCAT communication. The global address area is used for
the PDO communication. The local address area stores object data for each station.
(c) The master requests the slave to shifts to the Safe-Operational state.
(d) The state shifts to the Safe-Operational state.
Synchronous
(a) The master and slave use Distributed Clocks to synchronize.
(b) The master starts to output a valid command value.
(c) The master requests the slave to shift to the Operational state.
(d) The state shifts to the Operational state.
When the master requests the slave to shifts to the Pre-Operational state, the state shifts to the Pre-Operational
state.
When the master requests the slave to shifts to the Safe-Operational state, the state shifts to the Safe-Operational
state.
In the following case, the state shifts to the init state.
When the master requests the slave to shifts to the Init state.
When the master requests the slave to shift to the Bootstrap state, the state shifts to the Bootstrap state.
 Loading...
Loading...








