18.EtherCAT COMMUNICATION
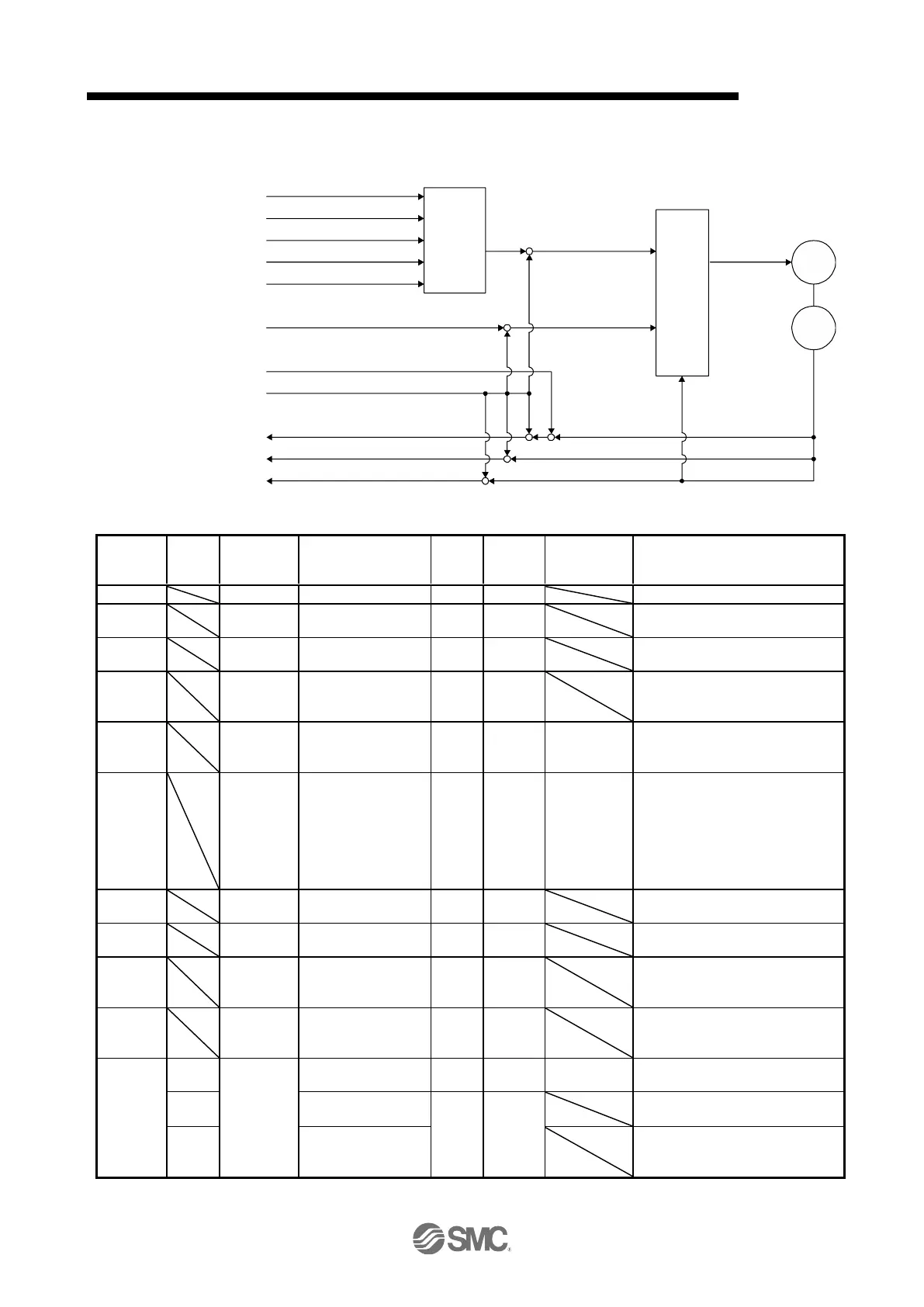
18.5.4.8 Profile torque mode (tq)
The following shows the functions and related objects of the profile torque mode (tq).
Torque
control
and
power
stage
×
×
×
×
Torque demand
(6074h)
Position actual internal
value (6063h)
× ×
Trajectry
generator
Torque slope (6087h)
Torque profile type (6088h)
Torque actual value (6077h)
Position actual value (6064h)
Velocity actual value (606Ch)
Torque limit value (60E0h, 60E1h)
Controlword (6040h)
Max torque (6072h)
Target torque (6071h)
Polarity (607Eh)
Gear ratio (6091h)
Encoder
Motor
Command torque Unit: 0.1%
(rated torque of 100%)
Maximum torque Unit: 0.1%
(rated torque of 100%)
Command torque (after limit)
Unit: 0.1% (rated torque of
100%)
Torque variation
Unit: 0.1%/s (rated torque of
100%)
Torque variation pattern
0000h: Linear ramp
0001h: Sin
2
ramp (not supported)
(Note 1)
0002h to 7FFFh: reserved
8000h to FFFFh: Manufacturer
specific
Position actual
internal value
Current position (Enc inc)
Current position (Pos units)
Current speed
Unit: Vel unit (0.01 r/min or 0.01
mm/s)
Current torque
Unit: 0.1% (rated torque of
100%)
Travel distance per revolution of
an output shaft
Travel distance
Refer to section 7.3.14 (4).
Number of servo motor shaft
revolutions
Refer to section 7.3.14 (4).

 Loading...
Loading...







