18.EtherCAT COMMUNICATION
(3) Details on the OMS bit of Statusword (pv mode)
0 (Halt (Bit 8) = 0): Target velocity not reached.
0 (Halt (Bit 8) = 1): Axis decelerates
1 (Halt (Bit 8) = 0): Target velocity reached.
1 (Halt (Bit 8) = 1): Velocity of axis is 0
Judgment condition for Target velocity reached
If the error between Velocity actual value (606Ch) and Target velocity (60FFh) has
stayed within Velocity window (606Dh) for Velocity window time (606Eh) or more,
Target velocity reached is stored.
0: Speed is not equal 0
1: Speed is equal 0
Judgment condition for Speed is not equal 0
If the absolute value of Velocity actual value (606Ch) has exceeded Velocity threshold
(606Fh) for Velocity threshold time (6070h) or more, Speed is not equal 0 is stored.
0: Maximum slippage not reached
1: Maximum slippage reached (not supported) (Note)
Max slippage is a maximum slippage of the asynchronous servo motor.
This is not supported by the driver.
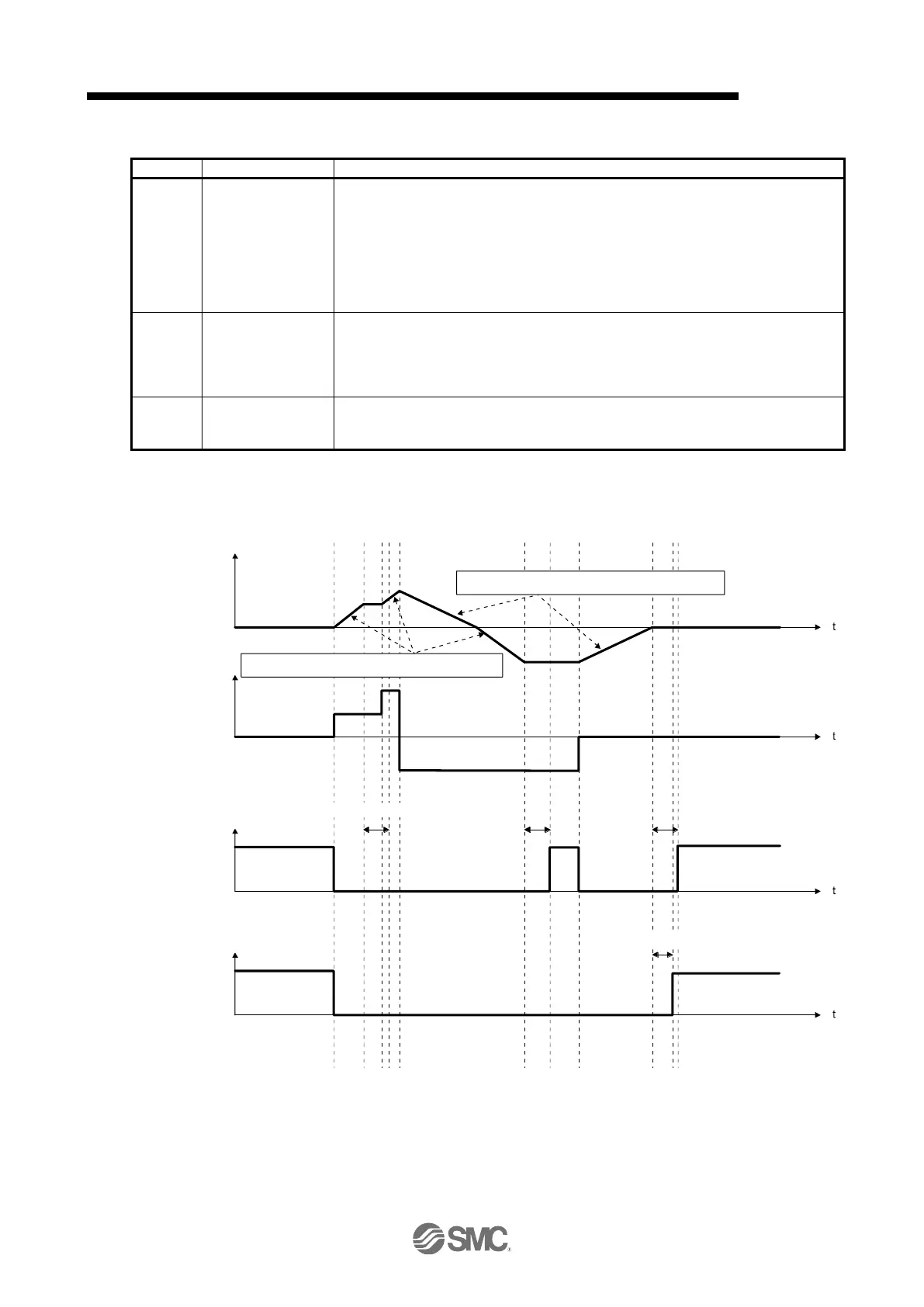
(4) pv mode operation sequence
Velocity Actual Value
(606Ch)
Target Velocity
(60FFh)
Speed Statusword
(6041h) bit 12
Target reached
Statusword
(6041h) bit 10
Velocity w indow time (606Eh)
Velocity threshold time (6070h)
Accelerates with Profile acceleration (6083h)
Decelerates with Profile deceleration (6084h)

 Loading...
Loading...







