20.6.2 Control switching
When telegram 102 is used
Because control switching has a delay, the upper side must keep sending command values corresponding to
the control mode before and after the switching. After the completion of control switching has been checked
with Modes of operation display, update of the command value before the switching can be stopped.
Before switching the mode from or to Profile position mode (pp), check that the servo motor speed is zero
speed. Zero speed state can be obtained with Bit 3 (S_ZSP) of Status DO 2 (P11538). If the motor is not zero
speed state, the control will not be switched and Modes of operation display will not change.
Changes to the OMS bit of Controlword are not accepted until control switching is completed. Before inputting
commands, check that the control mode has been switched referring to Modes of operation display.
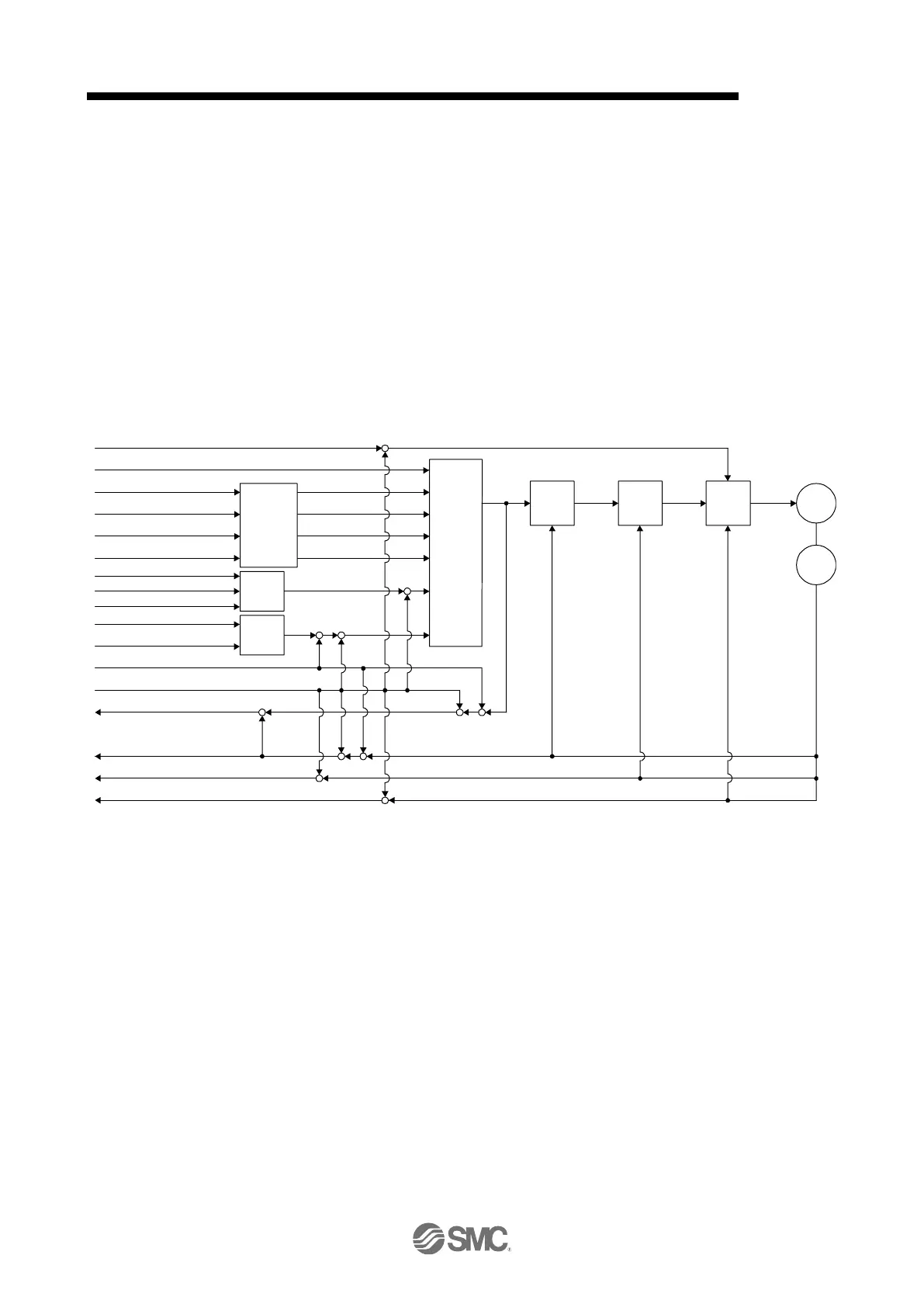
20.6.3 Profile position mode (pp)
The following shows the functions and related PROFIdrive parameters of the profile position mode (pp).
Position
trajectry
generator
+
×
×
×
×
×
×
×
-
Control
effort
(P24826)
Position actual internal value (P24675)×
×
×
Position
limit
function
Velocity
limit
function
Acceleration
limit
function
Position
control
Velocity
control
Torque
control
Encoder
Motor
Torque limit value (P24800, P24801)
Motion profile type (P24710)
Profile acceleration (P24707)
Profile deceleration (P24708)
Quick Stop deceleration (P24709)
Quick stop option code (P24666)
Profile velocity (P24705)
Max motor speed (P24704)
Target position (P24698)
Software position limit (P24701)
Gear ratio (P24721)
Polarity (P24702)
Following error actual value (P24820)
Position actual value (P24676)
Velocity actual value (P24684)
Torque actual value (P24695)
Max profile velocity (P24703)

 Loading...
Loading...







