20.PROFINET COMMUNICATION
20.9.3.11 Homing Mode Objects
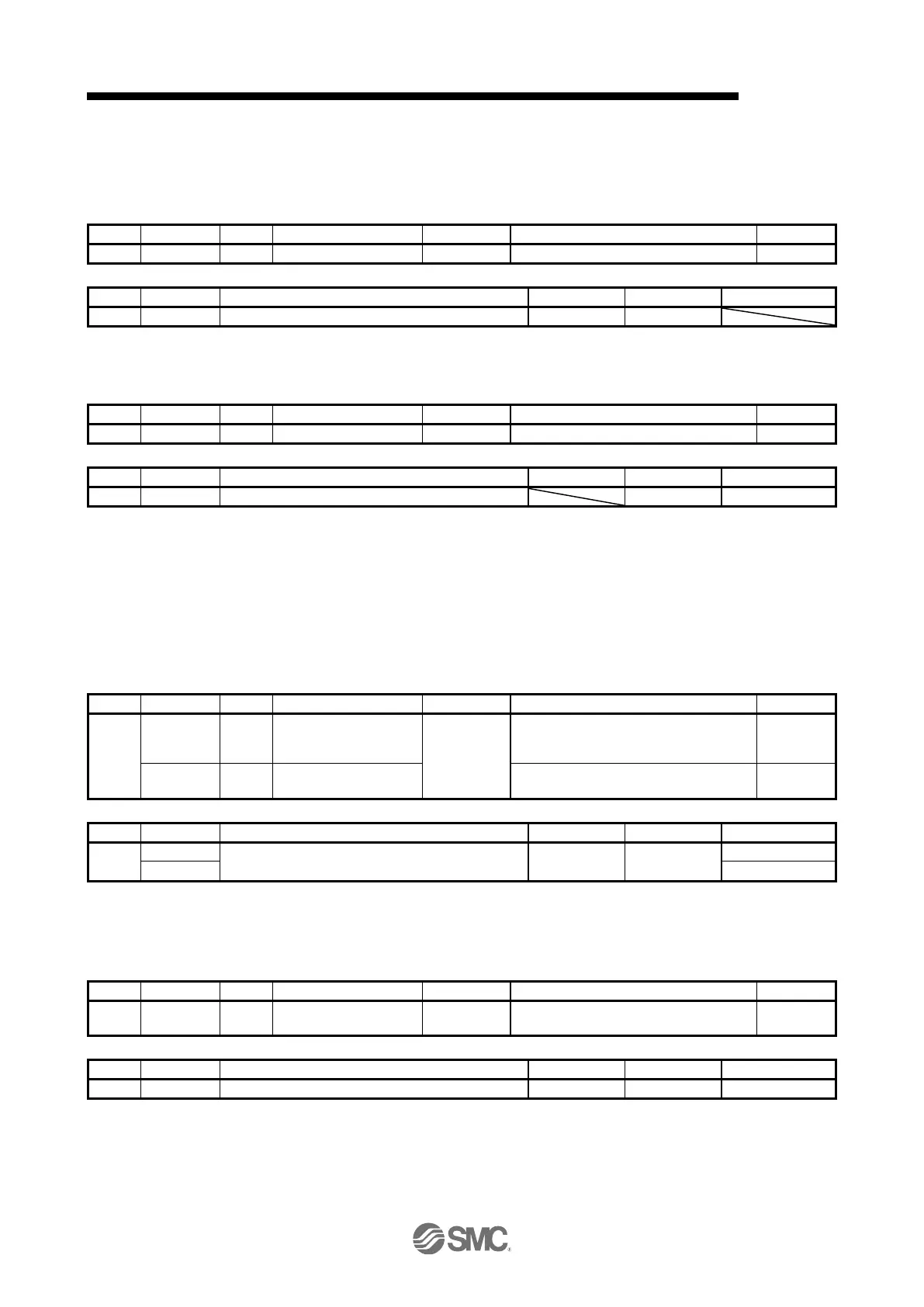
(1) Home offset (P24700)
The home position is returned. Only reading the value is available. Do not perform writing because doing
so causes an error.
(2) Homing method (P24728)
Set a home position return type. Refer to section 6.6 (4) for the settable values.
Home position return type
(3) Homing speeds (P24729)
Set the servo motor speed at home position return.
Set the servo motor speed at home position return for Speed during search for switch (P24729.0).
Unit: [0.01 r/min]
Set the creep speed after proximity dog at home position return for Speed during search for zero
(P24729.1).
Unit: [0.01 r/min]
Speed during search for
switch
Home position return speed
Speed during search for
zero
00000000h to permissible speed
(4) Homing acceleration (P24730)
Set the acceleration/deceleration time constants at home position return. Set a time for the servo motor
to reach the rated speed.
Home position return
acceleration/deceleration time constant
00000000h to 00004E20h (20000)

 Loading...
Loading...







