18.EtherCAT COMMUNICATION
18.5.4 Control mode
18.5.4.1 Selecting control mode (Modes of operation)
Specify a control mode with Modes of operation (6060h). Modes of operation (6060h) can be rewritten with
PDO or SDO. Note that usable control modes are limited depending on the setting of [Pr. PA01], as shown in
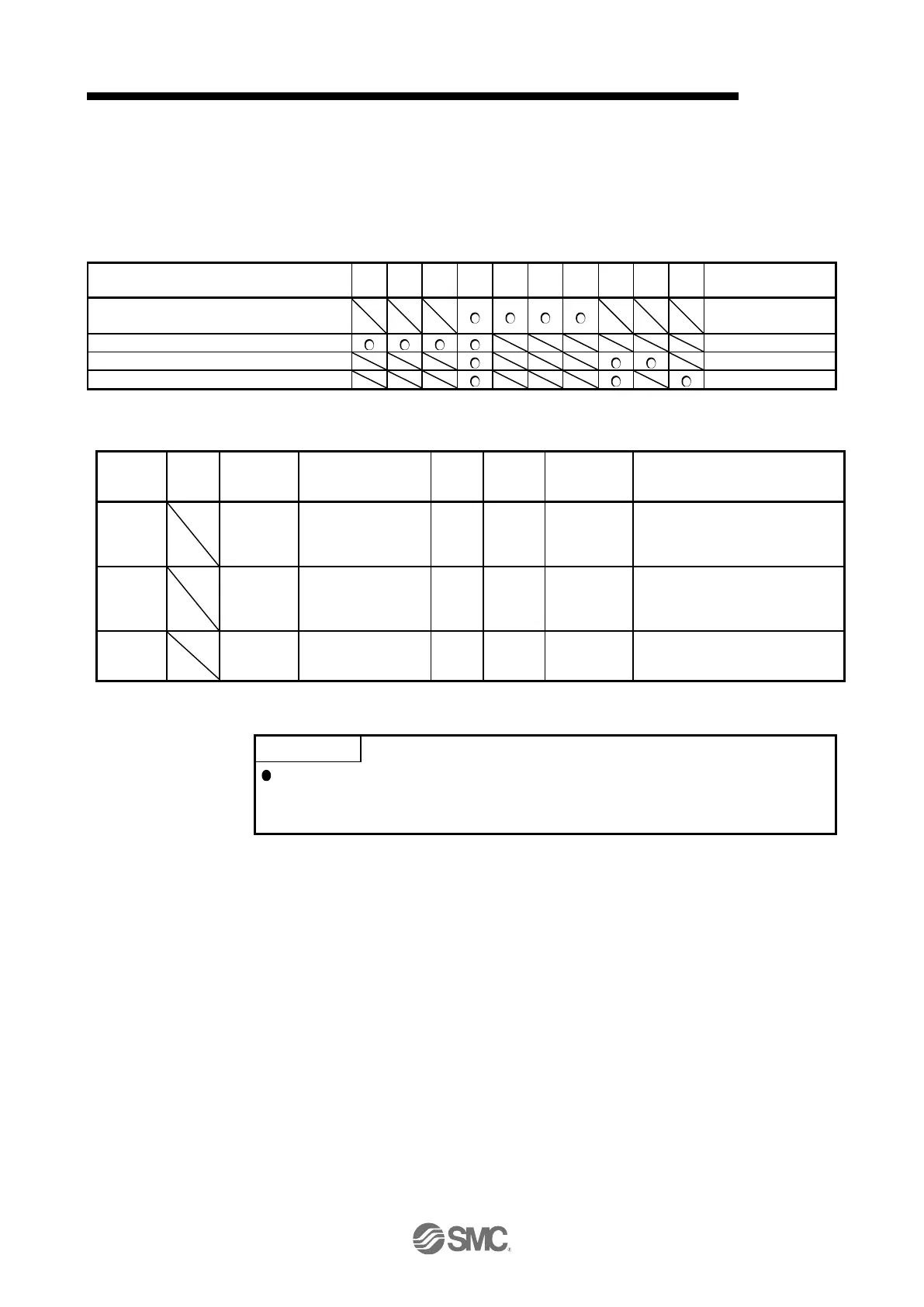
the following table.
6060h/6061h
Default value
_ _ _ 0: Automatic selection by each network
_ _ _ 1: Cyclic synchronous mode
_ _ _ 6: Positioning mode (point table method)
_ _ _ 8: Positioning mode (indexer method)
The following table shows the objects selected for control modes.
Differs
depending
on
[Pr. PA01].
Refer to section 7.3.8 (6).
Modes of
operation display
Differs
depending
on
[Pr. PA01].
Refer to section 7.3.8 (7).
Refer to
section
7.3.8 (8).
Refer to section 7.3.8 (8).
18.5.4.2 Control switching
Changes to the OMS bit of Controlword (6040h) are not accepted until control
switching is completed. Before inputting commands, check that the control mode
has been switched referring to Modes of operation display (6061h).
Because control switching has a delay, the upper side must keep sending command values corresponding to
the control mode before and after the switching. After the completion of control switching has been checked
with Modes of operation display (6061h), update of the command value before the switching can be stopped.
Before switching the mode from or to the position mode, check that the servo motor speed is zero speed.
Zero speed can be obtained with Bit 3 (S_ZSP) of Status DO 2 (2D12h). If the servo motor speed is not zero
speed, the control will not be switched and Modes of operation display (6061h) will not change.

 Loading...
Loading...







