18.EtherCAT COMMUNICATION
18.5.3 Statusword/Status DO
The objects of Statusword or Status DO notify the master (upper side) of the FSA state of the _ driver and
other drive status. Use 6041h to notify the status defined with CiA 402. Use 2D11h to 2D13h, 2D15h and
2D17h for the other Vendor-specific statuses.
The servo status is returned.
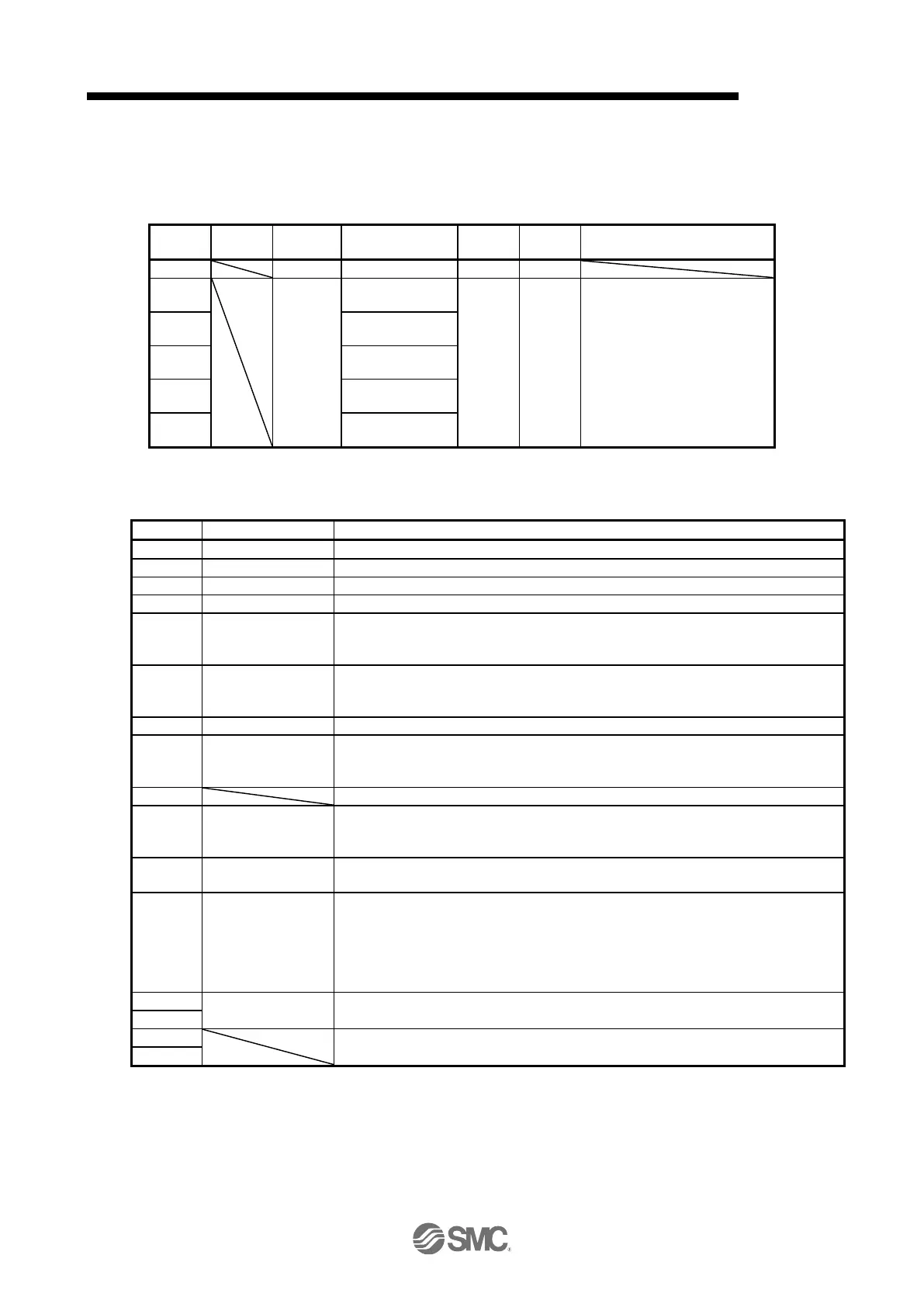
18.5.3.1 Bit definition of Statusword
The following table shows the bit definition of Statusword.
Voltage-enabled
0: The bus voltage is lower than the certain (RA) level.
1: The bus voltage is equal to or higher than the certain level.
Quick stop
0: During a quick stop
1: No during a quick stop (including during the test mode)
Warning
0: No warning has been occurred.
1: A warning has occurred.
The value at reading is undefined.
Remote
0: Not following the Controlword command
1: In operation following the Controlword command
Target reached
Differs depending on Modes of operation (6060h). (Refer to section 5.4.)
Internal limit active
0: The forward rotation stroke end, reverse rotation stroke end, and software position
limit have not been reached
1: The forward rotation stroke end, reverse rotation stroke end, or software position
limit has been reached.
(Enabled in the csp, csv, pp, pv, hm, pt, jg, or idx mode)
Differs depending on Modes of operation (6060h). (Refer to section 5.4.)
The value at reading is undefined.

 Loading...
Loading...







